I am building a Qplane with 2 tilt rotors at front and one non-tilt rotor at rear. See attached photo.
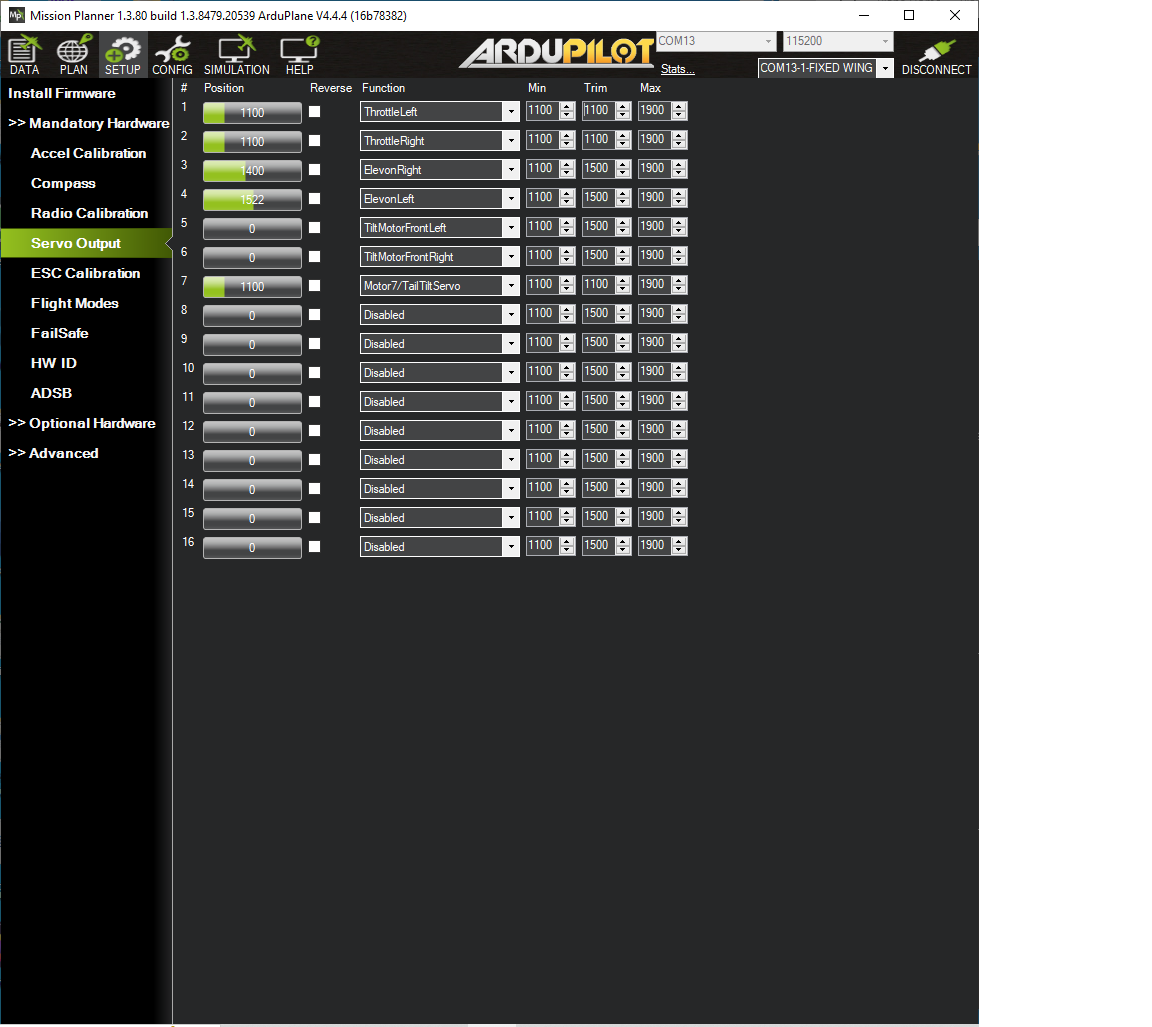
FC is Pixhawk running AP V4.4.4. I also attach the Servo Output page of MP and the param.
When the plane is powered up :-- (Tried both QStabilize and FBWA mode)
Position #3 and #4 (Elevon Right/Left) in Servo Output respond to Tx input of elevator and aileron stick.
Position 1, #2 and #7 green bars do not move in response to throttle stick
Position #5 and #6 – no green bar appear
Pixhawk Output pin connection :–
1 Left ESC
2 Right ESC
3 Right elevon servo
4 Left elevon servo
5 Left tilt servo
6 Right tilt servo
7 Rear ESC
The relevant Prearm msg is : No Servox_Function set to Motor 1.
I don’t know which is Motor 1, but I clearly set the values to all the 3 motors as shown in Servo Output page.
I think you want Q_TILT_TYPE=2 for vectored yaw.
And instead of using throttleleft/right you should be using motor1/2 and motor4 for the tail.
Not sure why you aren’t seeing tilt servo outputs…
Thank you for yr reply.
I changed the Q_TILT_TYPE to 2, Position 1,2 and 7 to Motor 1, 2 and 4, but still no ESC output. I calibrated the radio and the 2 tilt servo output status bars appear, but still no output when
I forgot to tell you the ESCs keep on beeping as soon as I plug in the battery, and this is the issue I need to solve before I see any ESC output.
I did calibrate ESCs according to the wiki (set Q_ESC_CAL to 1, Qstabilize and arm the quad) but to no avail.
ESCs and motors were all working 1 week ago when I switched the FC from KK2 to Pixhawk.
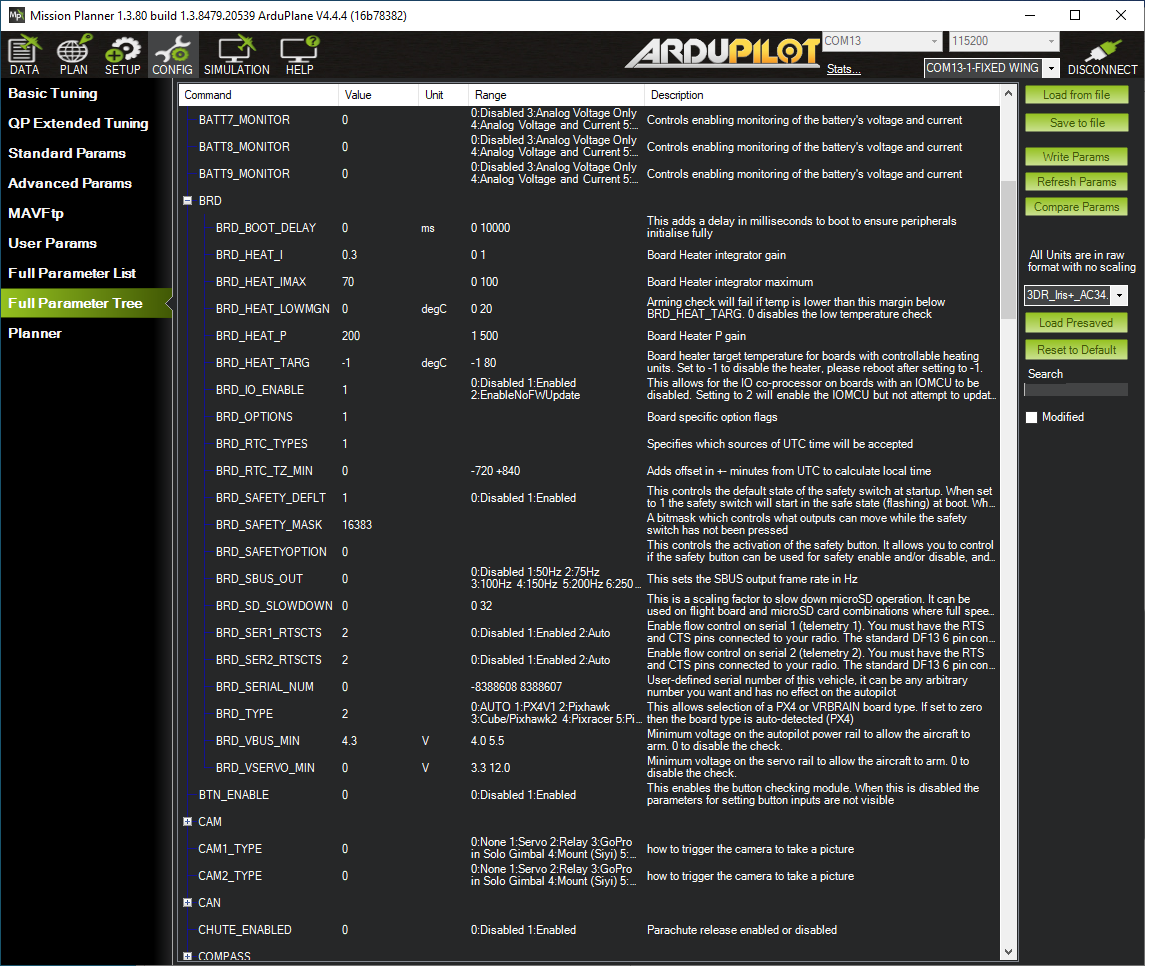
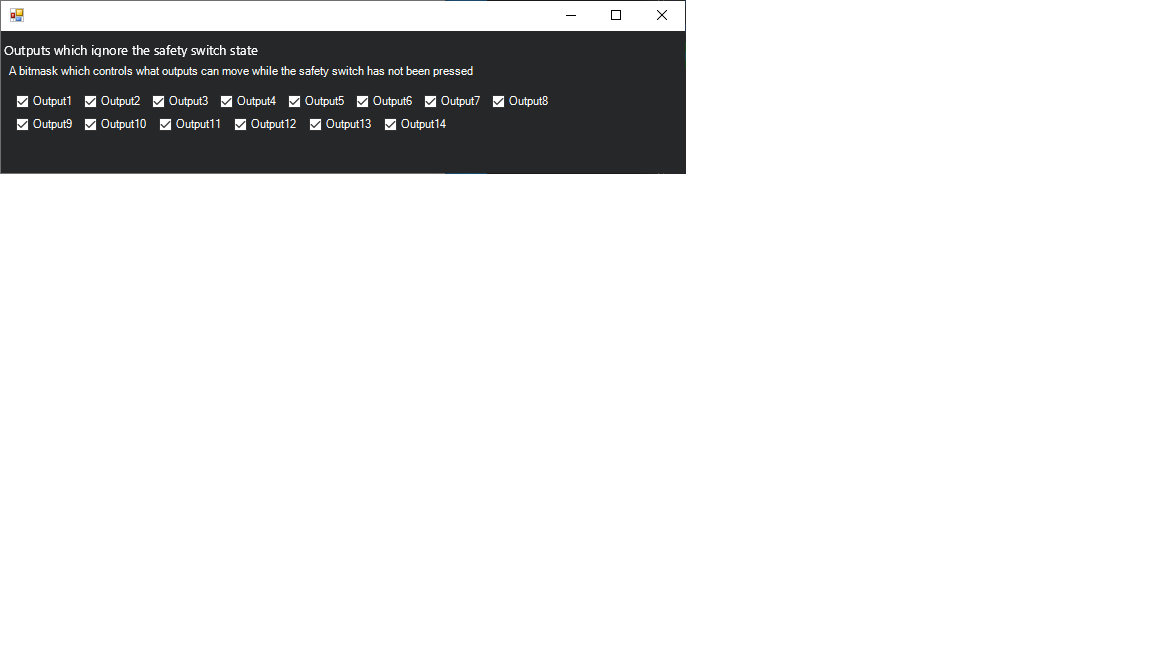
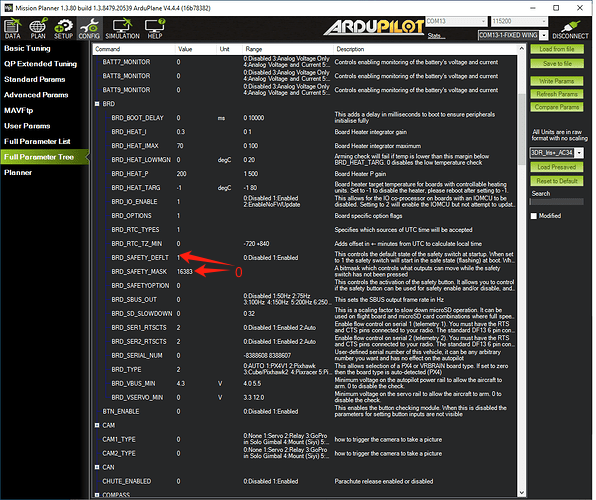
The nearest to BRD_SAFETYENABLE is BRD_SAFETY_MASK, and I enabled it, ie ignore the safety switch by clicking all the output, (value =16383) as shown here.
ESCs still keep on beeping and motors did not spin even armed. But when I connected the Safety Switch to Pixhawk, after pressing the switch, motors can spin after armed.
I want to get rid of the Safety Switch (as rudder stick arming is already a safety feature). No matter what values I tried on these 2 settings (BRD_SAFETY_MASK, and BRD_SAFETY_OPTION), I still need the safety switch to get the motors spin. I can get rid of the switch in earlier versions of Ardupilot.
For the time being, I will live with the safety switch…