Hi Bill,
I would greatly appreciate it if you would read through my post in more detail and indicate-me some issues you suspect with my set up of collective and throttle channels.
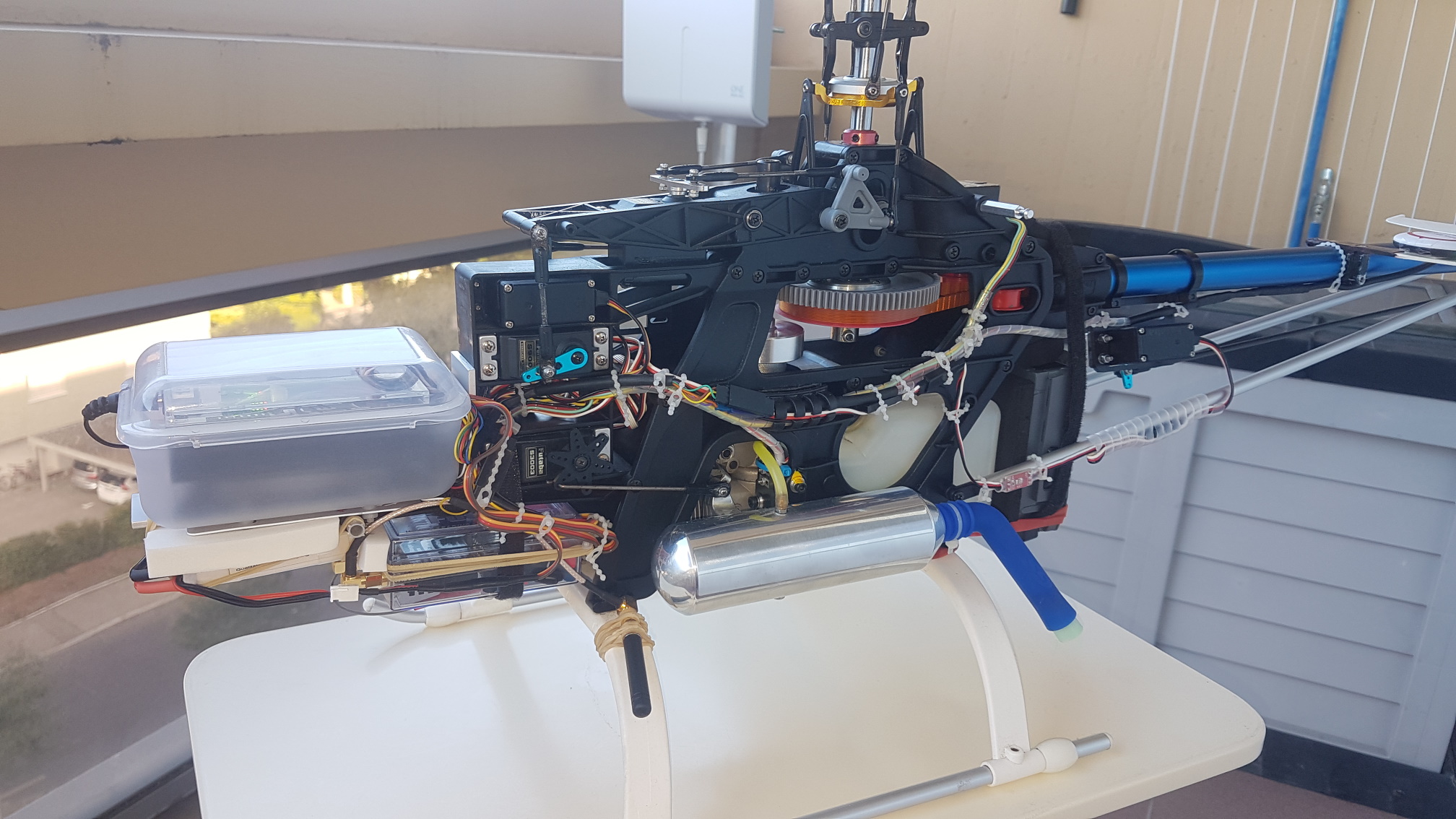
The helicopter is a nitro engine vintage helicopter (Raptor 30 v1).
At the moment, the flight mode is fixed on “Stabilize”. In the current setup the flight mode can be only be changed from the GCS (ground control station). I think this is not a problem for the time being, as I’m still in tuning phase. Once the tuning in “Stabilize” mode would be achieved, the tuning knob would be reassigned to flight mode.
This is how my RC Radio is setup:
- RC Channel 1 - aileron (roll control)
- RC Channel 2 - elevator (pitch control)
- RC Channel 3 - throttle (linear curve between stick and throttle); there is a “throttle hold” switch on the radio preventing the throttle to rise accidentally
- RC Channel 4 - rudder (tail rotor)
- RC Channel 5 - in flight tuning (tuning knob)
- RC Channel 6 - collective pitch (linear curve between stick and collective pitch)
It’s more or less based on the recommendations from Chris Olson’s ArduPilot TradHeli Setup, Video 4.
This is how the flight controller is set up:
On the receiver PWM output, is a PWM → SBUS converter. Some PPM wires are swapped (remapped) like this:
- RC Channel 3 → RC Channel 8
- RC Channel 6 → RC Channel 3
The Rotor’s Speed Control mode is: “Throttle Curve”
The Throttle Curve is: 25, 50, 60, 70, 100.
The Stabilize Collective Curve is: 0, 52, 62, 100.
And for the servos functions:
- Servo 1 - Motor1 - aileron (roll control)
- Servo 2 - Motor2 - elevator (pitch control)
- Servo 3 - Motor3 - collective pitch
- Servo 4 - Motor4 - rudder (tail rotor)
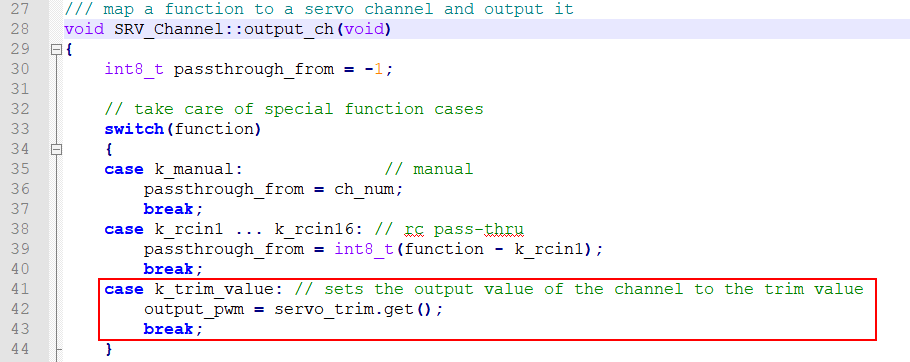
- Servo 5 - Trim value - governor setpoint (constant function, NEW)
- Servo 6 - RCIN5
- Servo 7 - not used
- Servo 8 - HeliRSC
Remark: Instead of setting Servo 6 to RCIN5, it might also be wire-swapped.
The GCS communicates with the flight controller with a RFD 868x Long Range Telemetry Modem (I use WiFi as backup link). If I really need a supplementary channel, it might be possible to use the RFD 868x PPM Passthrough (making a PWM to PPM converter with some Arduinos Nano).
I already flown the helicopter in a similar setup (excepting that RC Channel 5 was the governor setpoint in RCPassThru mode).
Unfortunately, by trying to find the optimal tuning, I had a small crash. After analysis I found:
- Excessive vibrations
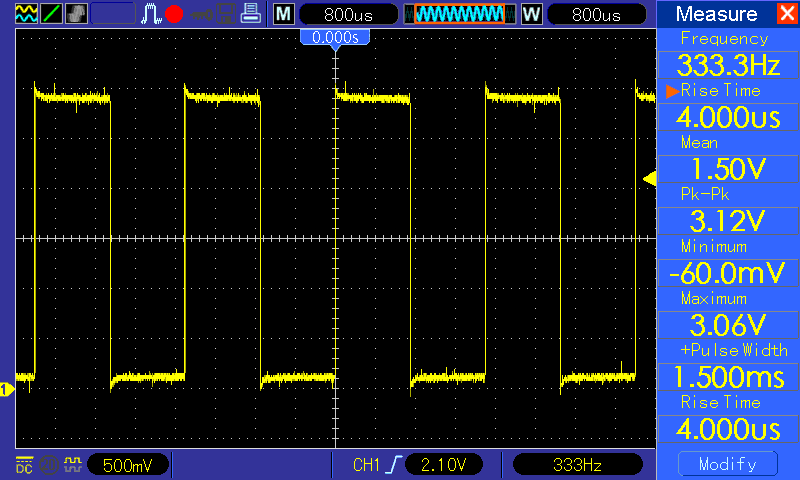
- Bad dynamic response of analog servos at RC_SPEED 125 Hz (only the rudder servo is digital)
- The necessity of a button to tune from the radio: in case of a dangerous tuning range, the pilot can immediately turn the knob back and land the helicopter safely.
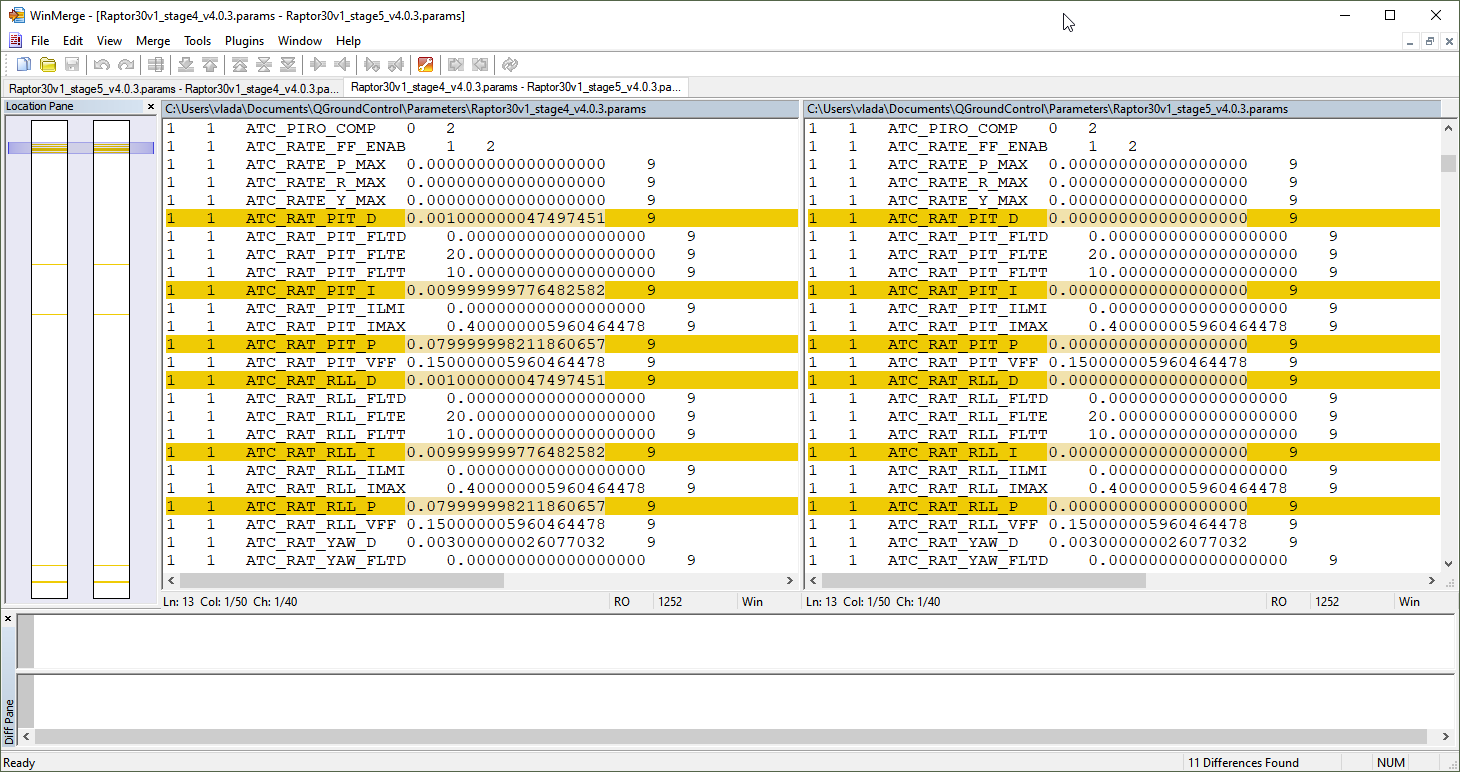
Therefore, for the next flight the following steps are planned:
- Set the RC_SPEED 50 Hz for all servos (done)
- Increase the flight controller suspension damping: make the shock mounts softer (done)
- Make tuning from the radio (done in my own version)
- Analysis of the Shock Response Spectrum (SRS) - we suspect that the box of the flight controller might induce some resonance frequencies
- The helicopter will be first flown in manual mode (RCPassThru on channel 1, 2, 3 and 6 + radio throttle curve set to : 29, 45, 60, 72, 100). In this phase, the vibrations levels will be registered and analyzed
- If vibrations levels are acceptable, then the manual mode will be disabled (cancel RCPassThru) and in-flight tuning of PIDs would be done from the RC button (tuning knob)
- Once the tuning achieved in “Stabilize” mode, the tuning knob channel would be reassigned to flight mode
Thank you
Vlad

 ):
):