Hello,
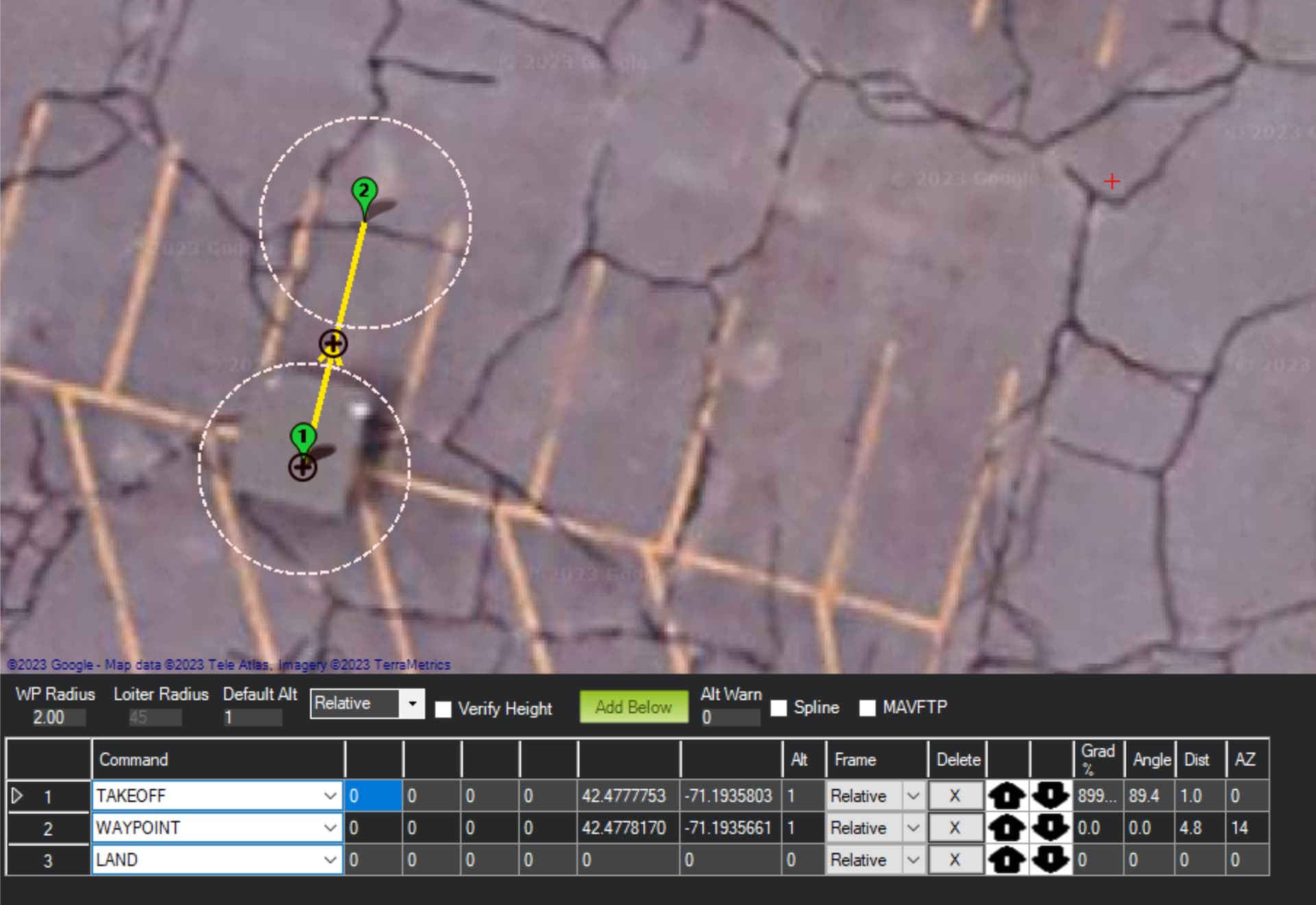
I built a drone with a PX4 mini 3dr and with an intel real-sense camera (so no GPS) to fly indoors. Today I tested the drone on the field, I created a simple mission
but I immediately encountered a huge problem: when the drone took off it went way higher than 1 meter and I had to stop the mission to avoid crushing it on the ceiling.
I’m sure that the camera is working correctly because the telemetry is correct. I suppose that the problem is how I set up the mission.
Can you please help me to understand what did I do wrong? I just wanted to take off to 1m, moving to WP1 and landing on WP1.
Moreover, what’s the meaning of the box “verify height” and “relative”/“absolute”?
I can’t help with the camera issue but here’s some of the mission planner questions:
From the wiki:
Verify height means that the Mission Planner will use Google Earth topology data to adjust your desired altitude at each waypoint to reflect the height of the ground beneath. So if your waypoint is on a hill, if this option is selected the Mission Planner will increase your ALT setting by the height of the hill. This is a good way to make sure you don’t crash into mountains!
Relative height is the height relative to the take-off location.
Absolute height is the height relative to sea level (MSL).