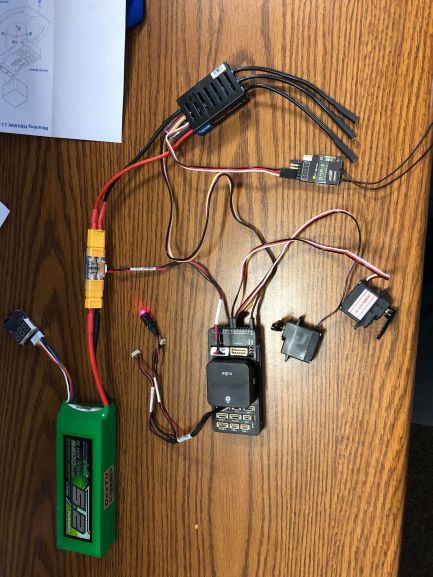
I’m new at this whole thing so this may be a dumb troubleshoot question. This is my current setup and I’m supplying power to my servo rail via the BEC plugged in. I have a Taranis Plus controller and I have throttle on channel 1, and elevons on channels 2 and 3. My servos are plugged into channels 2 and 3 yet they never seem to move. I’ve attempted changing channels and moving them but I still can never seem to get them to budge. I’m not sure if its a power problem or the Taranis etc. Any ideas? Thanks.
****Update I got it to work, I plugged in all of the cables from the ESC into the pixhawk rather than just one. I also changed it from the RCIN to plugging it into the main out.
-
Bad concept of getting power from your main power battery to power sensitive electronics. When motor(s ) will be active, esc switching noise will travel to your FC, Rx GPS etc… Worse possible configuration.
-
Get yourself a linear regulator (LDO), opto esc and a small 2S Liion battery for the sensitive electronics. Added bonus is that you can setup your FC parameters in complete safety as the main motor(s) can not start by accident as no power is available to them to do so.
-
And do not mix high power and low power. Then you’ll have a much better starting point.

Henri
I thought that zener diodes weren’t necessary on the Pixhawk 2? Thanks