Hello all,
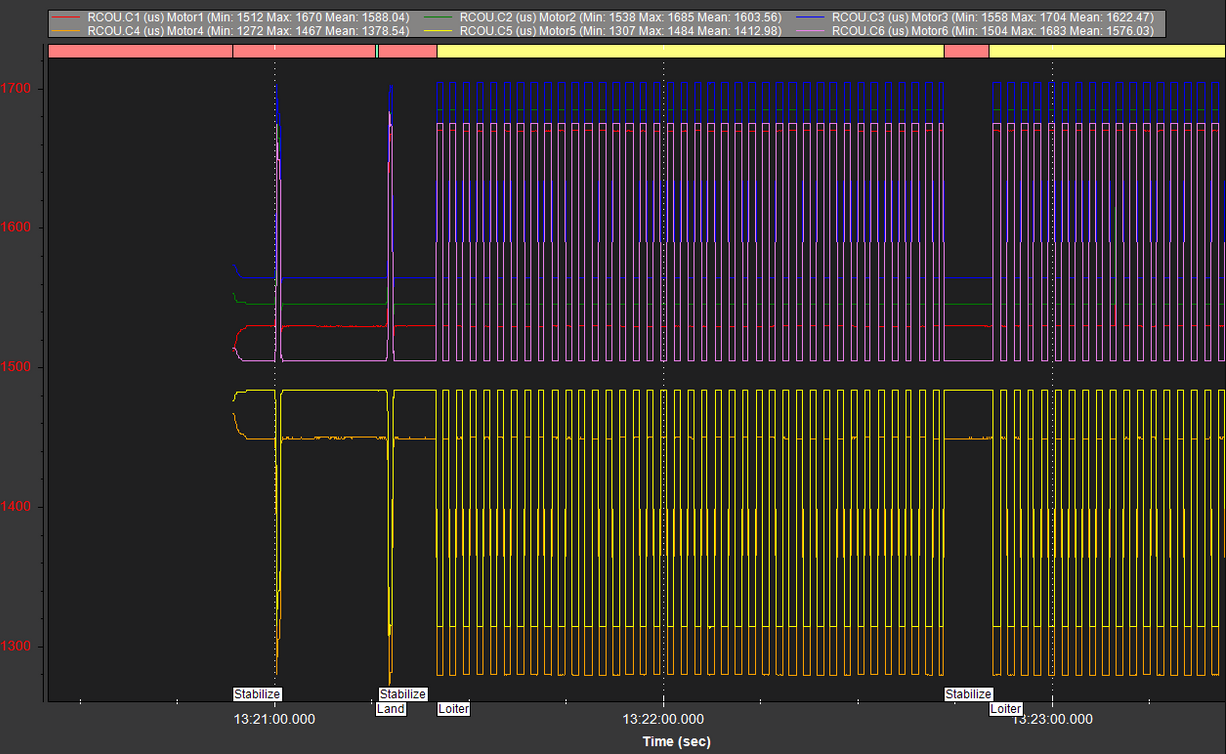
While conducting a ground run on a 700 dual H3 120 heli running on Ardupilot version 4.2.3, I encountered servo jittering when I changed the flight mode from stabilize to loiter. On further inspection, it was found that the PIXHAWK was providing this periodic pulse to all the servos in flight modes other than ‘stabilize’ as shown in the image below.
Additionally I didn’t face this servo jittering when i reverted the firmware back to 4.1 dev.
Would appreciate if anyone could shed a light on this topic.
Thank you
@Harshavardhana_M First of all, you have an issue with your collective setup. H_COL_ANG_MAX is less than H_COL_ANG_MIN. I don’t know if this would cause this issue but this is a serious set up problem. Please correct it and see if that resolves the issue. The H_COL_ANG_MIN has to be less than H_COL_ANG_MAX. Did you follow the Wiki for setting up the swashplate?
It seems that we had interchanged the H_COL_ANG_MAX and MIN values accidentally. Correcting this resolved the issue.
Yes. Version 4.1 was where we did the swashplate setup according to the procedure. However, while updating the firmware this parameter was newly introduced. We decided to keep it 10 deg and 0 deg.
I’m assuming this parameter is not utilized in stabilize flight mode and hence no jittering.
Not directly for determining collective position. Those parameters are mainly used for the code to know where the collective is when the flight mode is using altitude hold in the vertical axis. It uses those parameters to translate the LAND_COL_MIN value into PWM and the ZERO_THRST value into PWM. I will put a prearm check in there to ensure that the Min value is not larger than the max value.