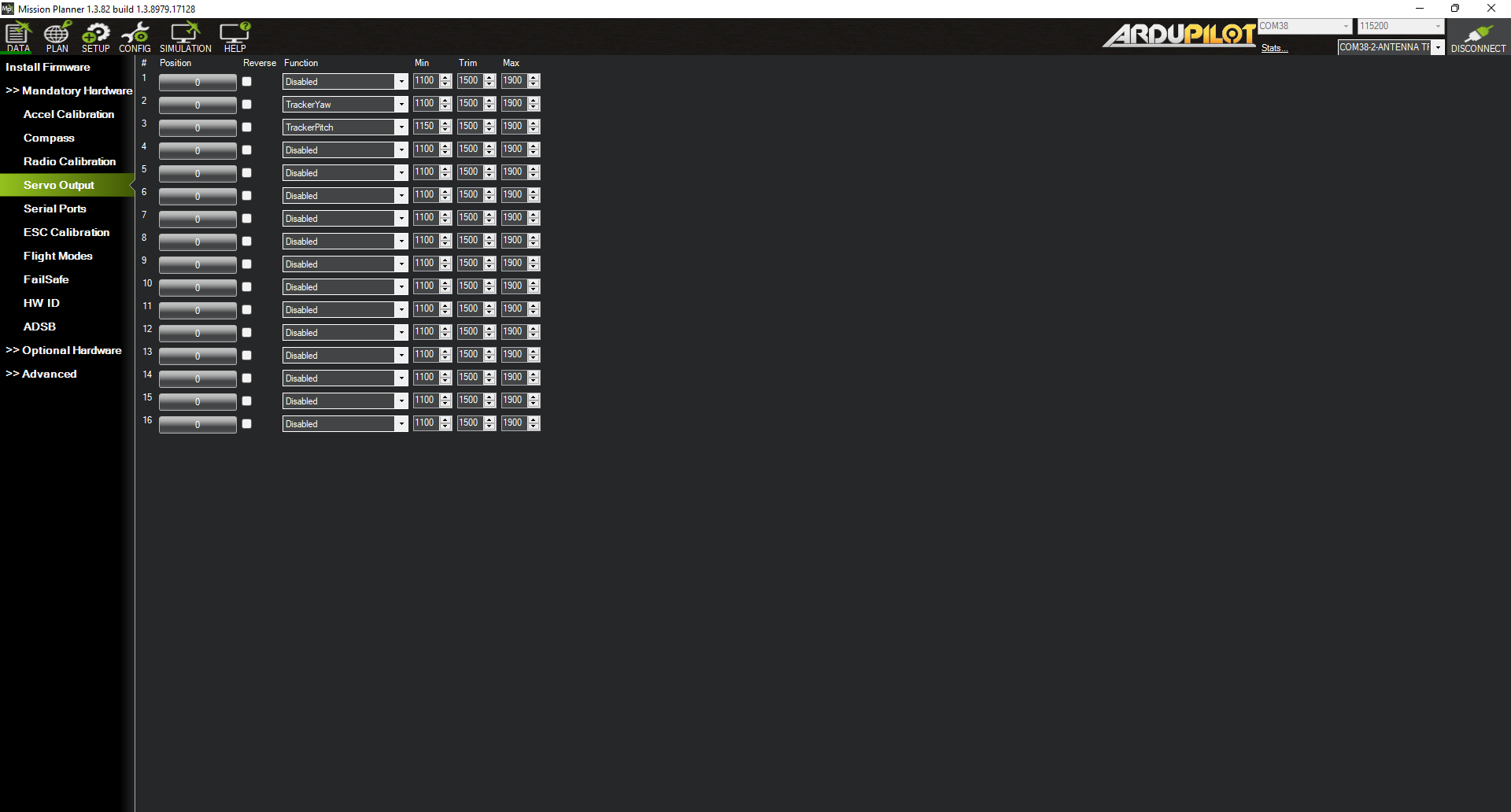
Problem. While the tracker does not receive data from the UAV, a 0 signal is sent to the servos. Since there is an infinite rotation servo on the pan axis, it rotates immediately after switching on until the tracker and drone are connected. It seems to me that a neutral signal of 1500 should be sent to all servos immediately after switching on.
1 Like
Hi @Alexey_Degterev,
Any chance you could provide a log file? That shouldn’t be the case I think so I wonder what the SERVOx_MIN, MAX and TRIM values are.
FYI @peterbarker @iampete
1 Like
This could happen when tracker is disarmed due to the SAFE_DISARM_PWM param.
Log one. FC connected via USB. Raspberry not powered. FC starting in ARMED AUTO mode.
If i disarm it using mission planner servo out go to 1500
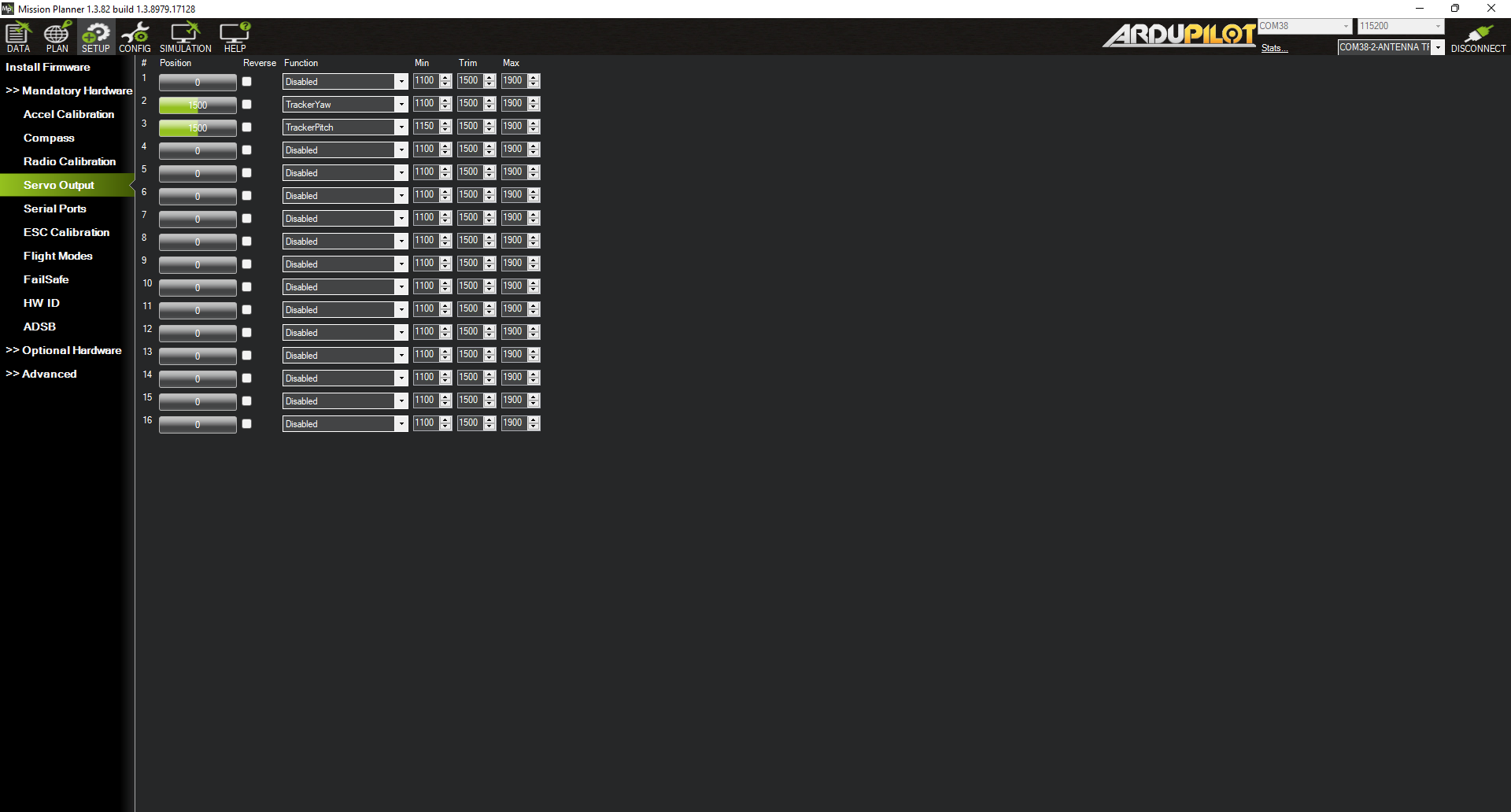
if i arm again servo out will be 1500 again without telemetry
second log
fc powered via usb after raspberry boot
also i found if fc powered using battery (i use matek h743wing for tracker) servo signal still 0 even if telemetry is received.
But if i connect FC using USB connection, servo signal ok. Strange situation