I’m afraid this request falls in the “remedial” category. Apologies.
After setting up a MavLink connection to my Alexmos gimbal, I wanted to try using standard PWM connections for tilt, roll and yaw.
I wired AUX1 on my carrier board to the RC_PITCH input on the Alexmos controller board.
I have a “knob” on my transmitter configured to channel 9 - for TILT.
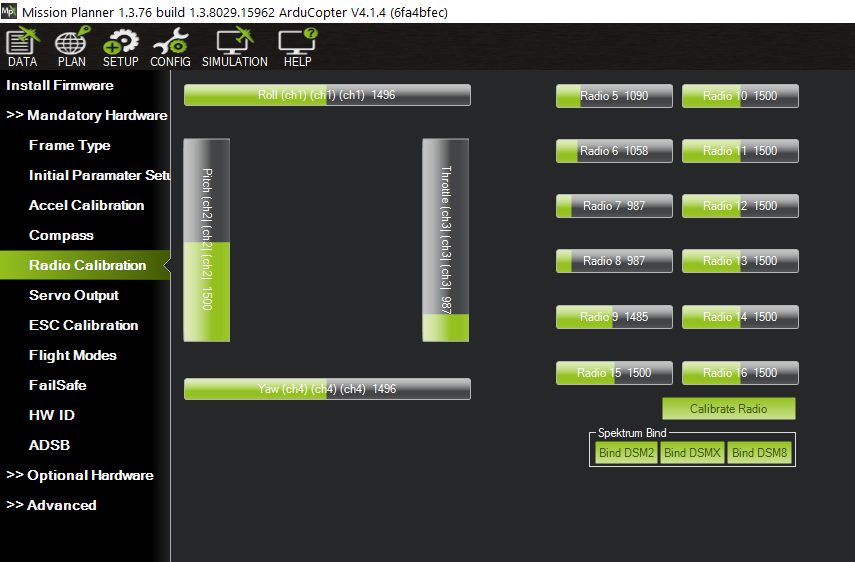
On the Mission Planner Setup/Radio-Calibration page channel 9 shows up properly - and responds properly with changes to the PWM bar indication when I move the “knob” higher and lower.
On the Mission Planner Optional-Hardware/Camera-Gimbal page, the gimbal is set up as “servo” type, and Tilt is assigned to SERVO9 and the Input-Channel is set to RC9.
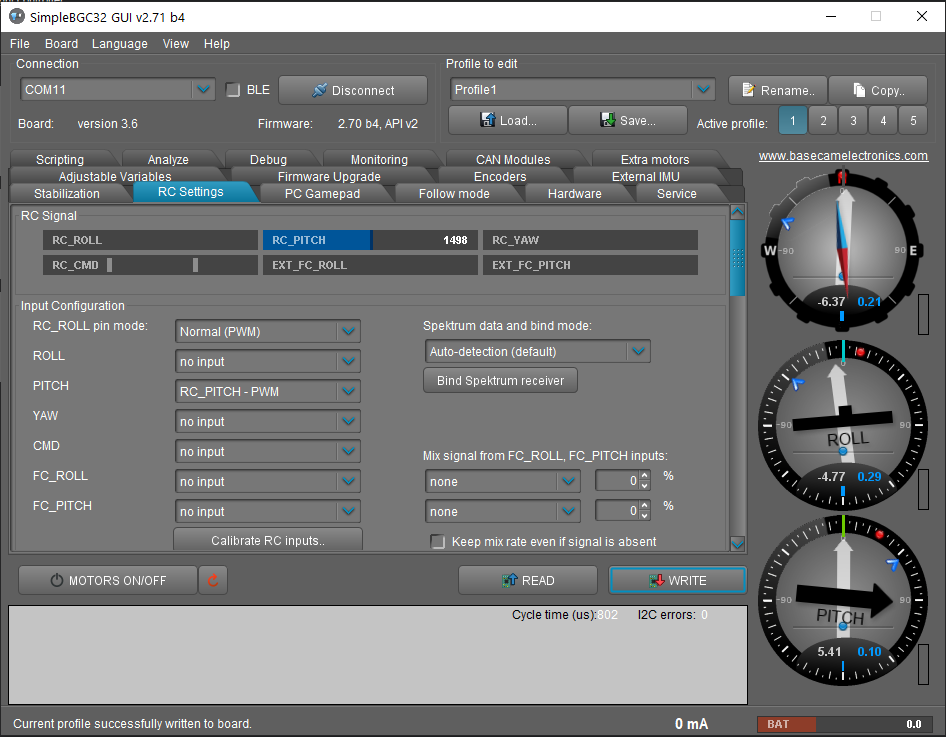
My problem is that when I turn the KNOB on my transmitter, there are no changes to the Servo Output as indicated on the Mission Planner Setup/Servo-Output page - and there’s no change on the Alexmos GUI’s screen indicating RC_TILT.
It seems there’s a parameter called “RCPassThru(n)” - I couldn’t find other references to these parameters. And on the tables - I’m not sure what the column labeled “ID” is referring to.
They exist. They are ID values used in the Servo Function to define the source for the pass thru. So SERVO9_FUNCTION set to “1” will pass RCIN9 to SERVO9 out. If it was “51” then it will pass RCIN1 to SERVO9 out.
If we were talking about SERVO10_FUNCTION and it was set to “1” then it would pass RCIN10 to SERVO10 out.
This allows you to configure any input to passthru any output. “1” respects Input/output