I’m building a Tri-VTOL V-Tail on a Speedybee F405-Wing. The front two motors have Tilt.
I’m new to Ardu, and I can’t quite get my head around the servo outputs.
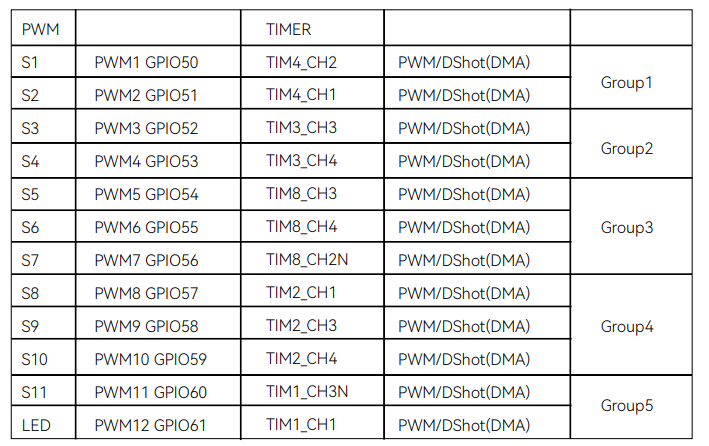
Do the servo numbers in the ‘Servo Output’ tab, directly reference the S# numbers on the speedybee?
e.g Servo 1 in the config, is servo output 1 on the board?
Or is there something more to the mapping that I’m missing?
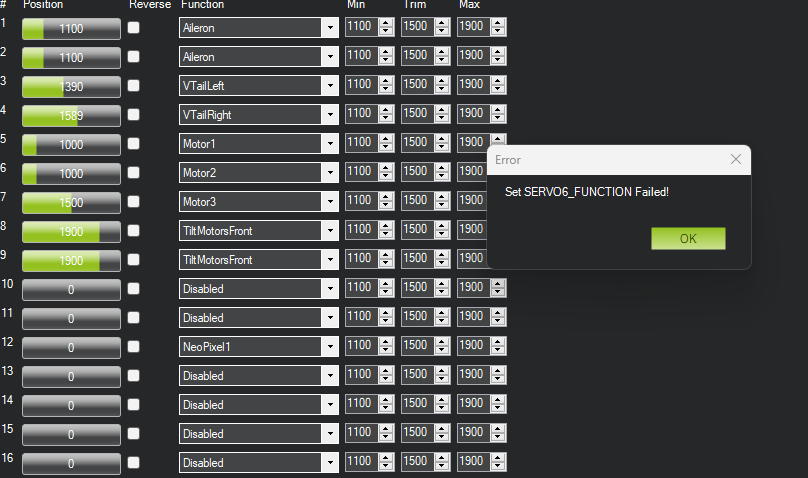
I seem to have some strange behaviour on servo 5 output. It is set as an Aileron the same as #4, but it isn’t responding smoothly. #4 smoothly responds to be tilting the board left and right (as an Aileron should). But servo 5 will only go to 1100, or 1900, nothing in-between.
Thanks, that helps a lot - Especially the timing groups. I presume the strange aileron behaviour is because its in a group where DSHOT is enabled.
I’ve rearranged the outputs so that the three motors are in a timer group 3. There would be a wasted output if I use group 1&2 as I was previously.
There is a slight typo on the ardu page, S2 is in both group 1 and 2. But the speedybee manual has the correct groups.
I’ve noticed I nearly always get an error when swapping the functions, yet it appears to save anyway. Is this a known bug? Or am I doing something wrong?
I also can’t seem to test the motors, I get the error “Command was denied by the autopilot”
I have no safety button, so BRD_SAFETY_DEFLT = 0.
I also tried to calibrate the ESC’s, but get the error "Set param error. Please ensure your version is AC3.3+
When I power the FC and ESC, I initially get the usual three beeps. then a pause, then three more power up beeps, followed by two low then high that indicate it has a low throttle signal.