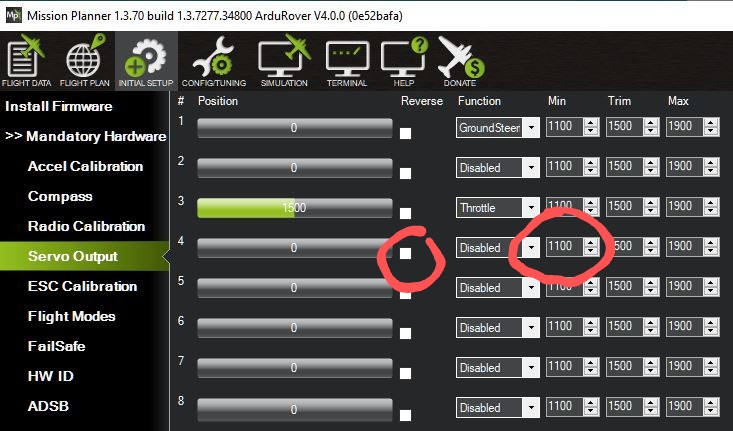
I need to control several servos to drop packages. In servo output I can set RC channel to control servo (RC passthrough). And I now need to limit servo min value and reverse it. In MP servo output settings there’re min max reverse settings, but they doesn’t affect on anything…
Is there any way to make limits and reverse work in MP?
P.S. Yes, I can do that in RC, but I don’t want that =)