Can anyone confirm if ArduPlane 4.5.7 still supports servo gimbal stabilization? I’ve built a custom firmware with all gimbal parameters enabled, but I can’t find any parameter (e.g., MNT1_STAB_ROLL or MNT1_STAB_PITCH) to enable stabilization.
Has this feature been removed in newer versions, or is there another way to achieve the same functionality? Any help would be greatly appreciated.
I actually faced the same issue - not seeing the MNT1_… and MNT2_… parameters in ArduRover 4.5.7. I came to the forum to create a post about it but found your topic, which turned out to be really helpful:
I’ve built a custom firmware with all gimbal parameters enabled.
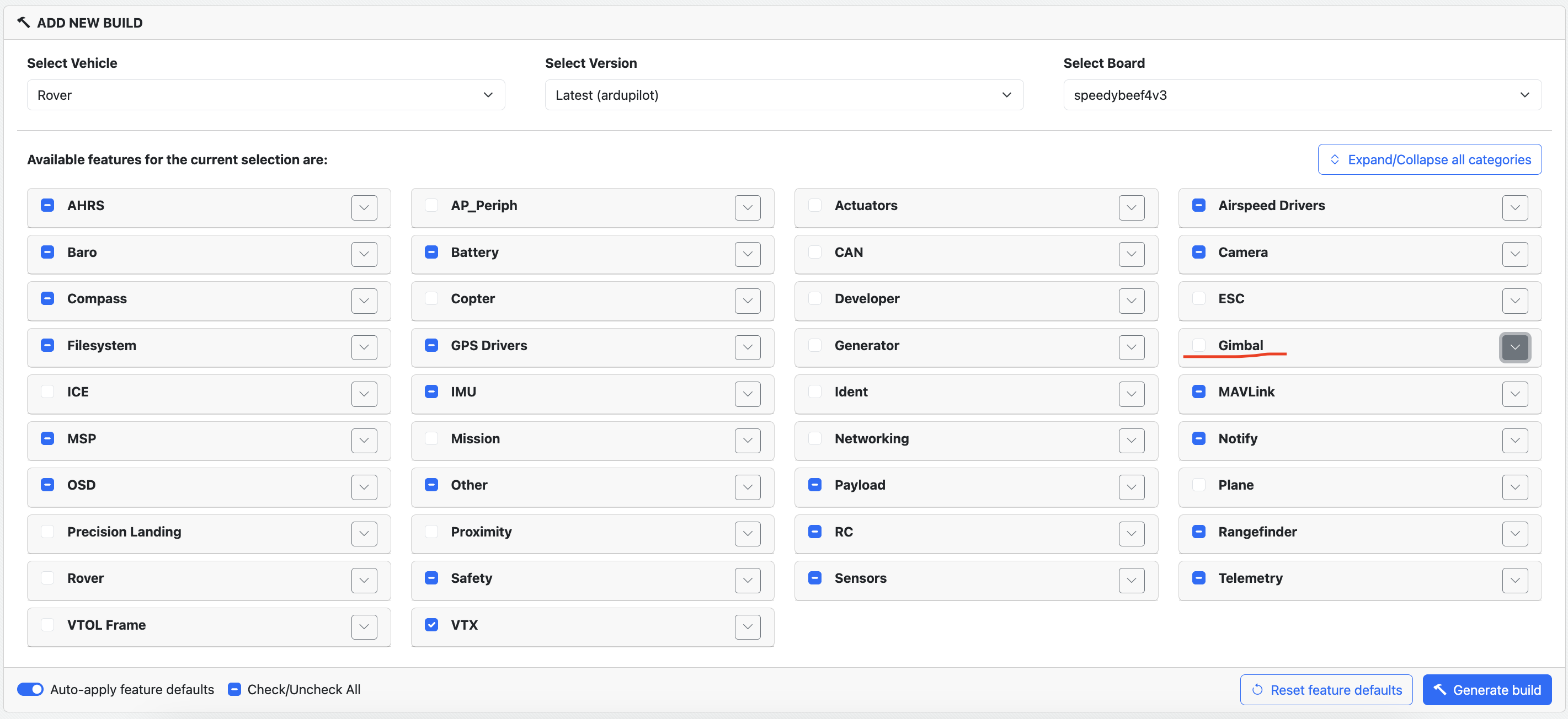
What I noticed: When selecting my target board SpeedyBee F405 V3, the default configuration does not include the gimbal section. It seems that’s why the official “default” Rover firmware for this board doesn’t support gimbals.
To fix this, I selected the servo gimbal option, built the firmware using the pipeline, and after some trial and error, I finally managed to get a successful build. Initially, I tried disabling unnecessary features, but that caused build/linker issues. It worked on the third attempt, and the final firmware size was even smaller than the original, so I’m sure it fits.