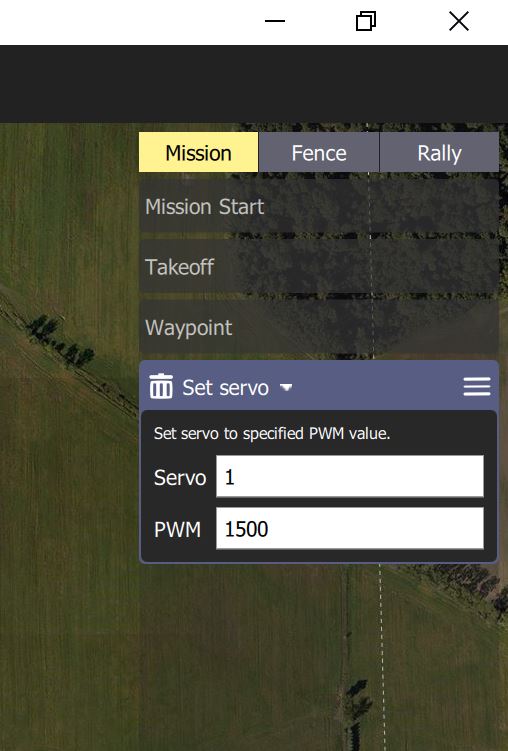
Hi, I’m using QGC with pixhawk 4.I want to control the servo during an autonomous mission. I can do that at QGC, right?
1 Like
Thanks a lot, but I decided to use mission planner with pixhawk 4. There is only one question left in my mind, how can I install ardupilot on my pixhawk?
From QGroundControl if you have PX4 on it now. Just select Ardupilot and the pull down options you need.
1 Like
As a result of my research, I thought that Mission Planner In(arduplane) would provide more stable flight. Do you think this is true?
I’m participating in the competition, it’s really important to me.
If you ask here the answer will be Ardupilot. If you ask on the PX4 forum the answer will be PX4.
2 Likes
You seem to be confusing ground station and firmware. Flight characteristics like stability are controlled by the firmware. Using one ground station software or another won’t generally cause flights to be more or less stable. They tend to just support different feature sets in different ways.
2 Likes