In autonomous flight, I delay the waypoint for 5 seconds and immediately after that I issue the DO_SET_SERVO command.
The problem is that the drone does the servo command after waiting for 5 seconds.
My aim is that the servo command is active when it reaches the waypoint and it stops and moves for 5 seconds. I guess the LOITER_TIME command doesn’t work either, what can I do? this is really important to me.
LOITER_TIME works fine. It’s not clear what sequence of events you want. Post a screen shot of the Mission Plan and a better description of what you want it to do.
And. run test Missions in Mission Planners Simulator and view the messages screen or status screen for what’s going on,
1 Like
Basically what I want is for the servo to turn on when the drone is at the start of the 5 second wait time when it comes to the second waypoint. In my tests, the drone goes to the waypoint, waits for 5 seconds, and then turns on the servo.
Hi
If I understand what you mean, you can reach your goal with the DELAY command after use the DO_SET_SERVO cmd.
Because the delay within waypoint is done immediately after reach wp.
1 Like
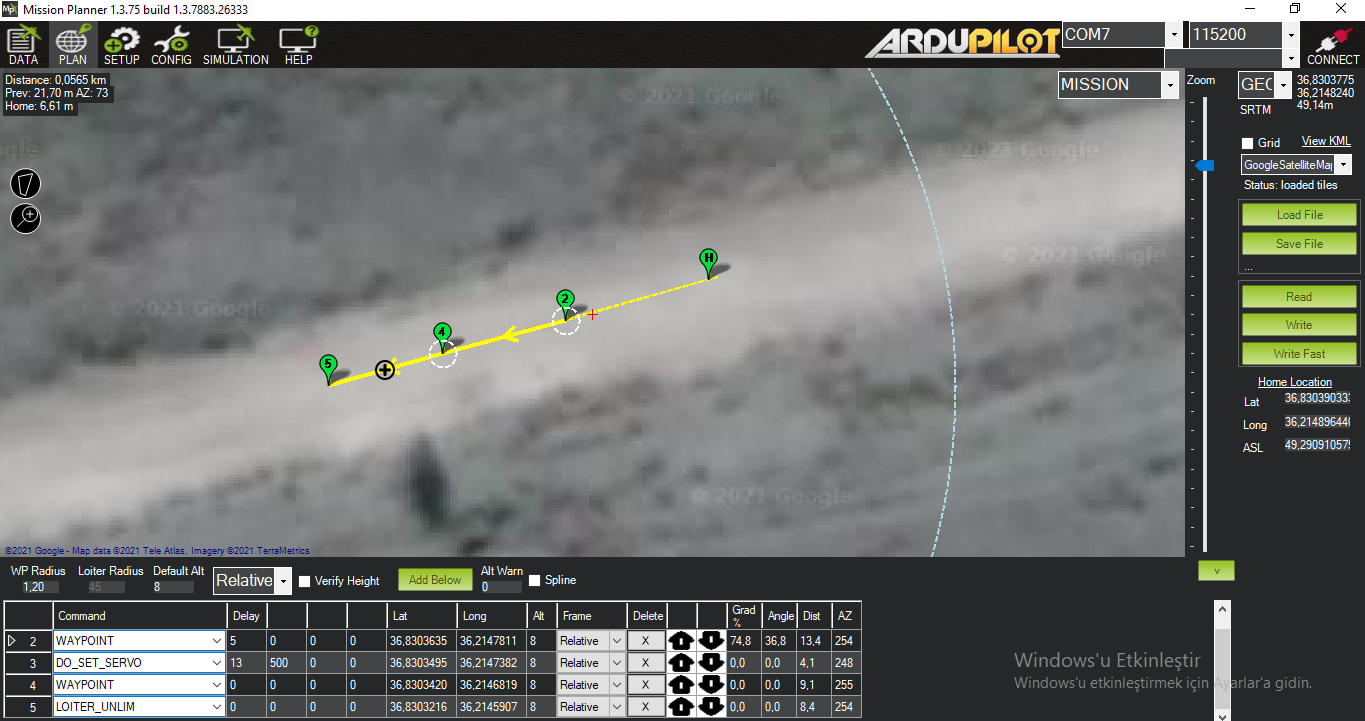
Hello, I don’t quite understand what you mean. I explain in detail. I want to add a delay time to the waypoint and run the servo within that delay time. When I do as in the picture, the drone waits first, and the servo starts when the waiting time is over. What I want to do is the operation of the servo at the beginning of the time.
What if you don’t add a delay to the target waypoint, then DO_SET_SERVO and then add another waypoint with exactly the same coordinates as the target waypoint but this time with a 5s delay. Maybe this could work?
1 Like
Because you don’t have the sequence of events right. Not sure what you hope to accomplish with a LOITER_UNLIMTED command.
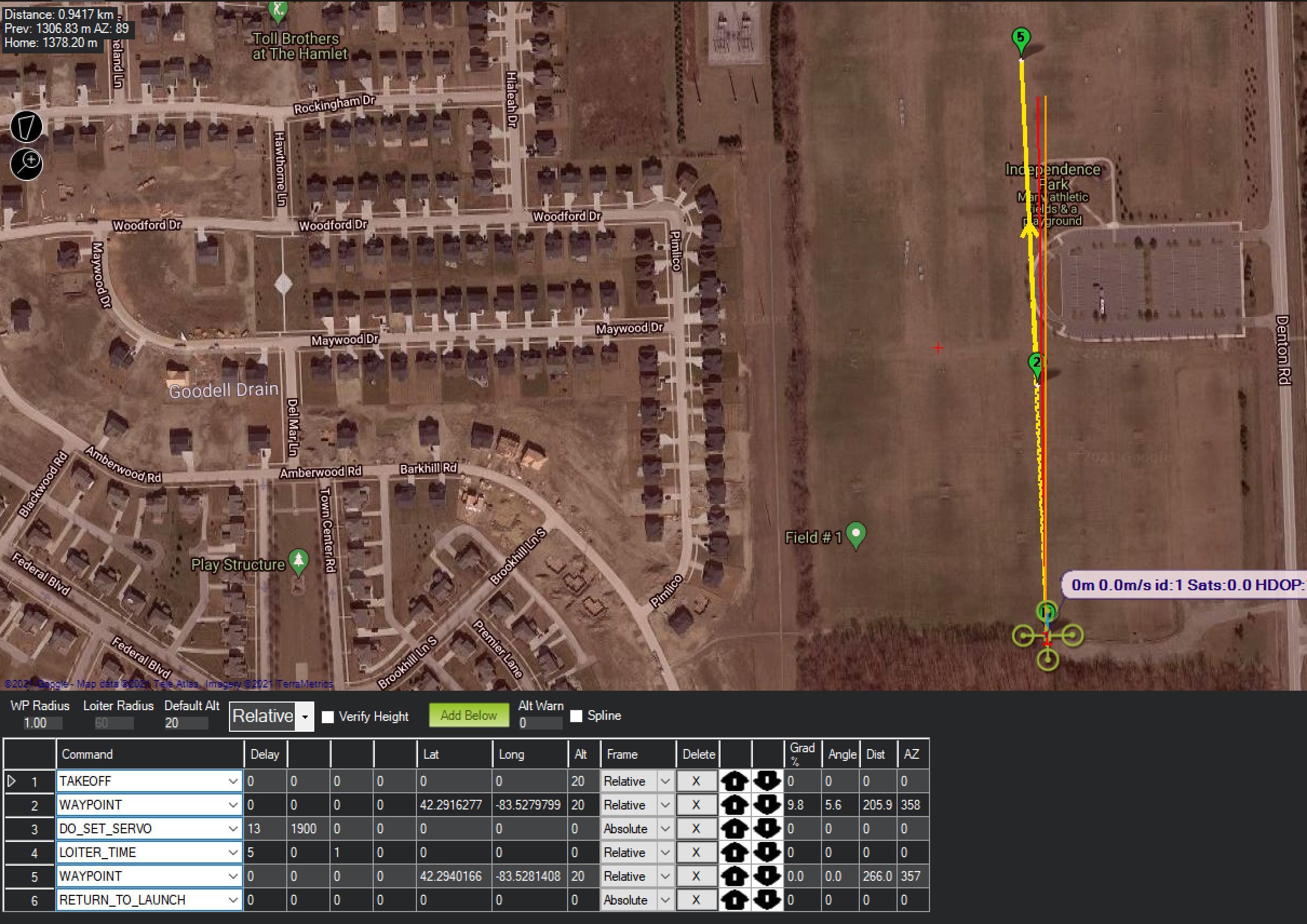
This will reach the 1st Waypoint (command 2), activate the servo, Loiter at that position for 5 seconds and move to the next Waypoint. Is this what you want?
This is exactly what I wanted, I’ll test it as soon as possible, I hope it works, thank you very much for that.
I think there was a misunderstanding in the LOITER_UNLIM command. I put the looter_unlim command to download the drone when the task is over, it’s a bit of luck that what I want is done with a LOITER command
Not following all of that but the LOITER_UNLIMITED command will Loiter in place until you switch out of Auto (change flight modes).
Make heavy use of the Simulator in Mission planner for this kind of experimentation. When it’s successful there then try a real flight. You can use the messages and status screen to see what is being run and activated.
1 Like
I want to use the simulation but my friend couldn’t do it, now we can’t spare time because the competition has started
Dave can you help me, I did the commands you said, this time the servo didn’t work at all?? Servo is not broken, what should I do?