Hi @bnsgeyer I need some additional support with my setup.
(I corrected the thrust vector)
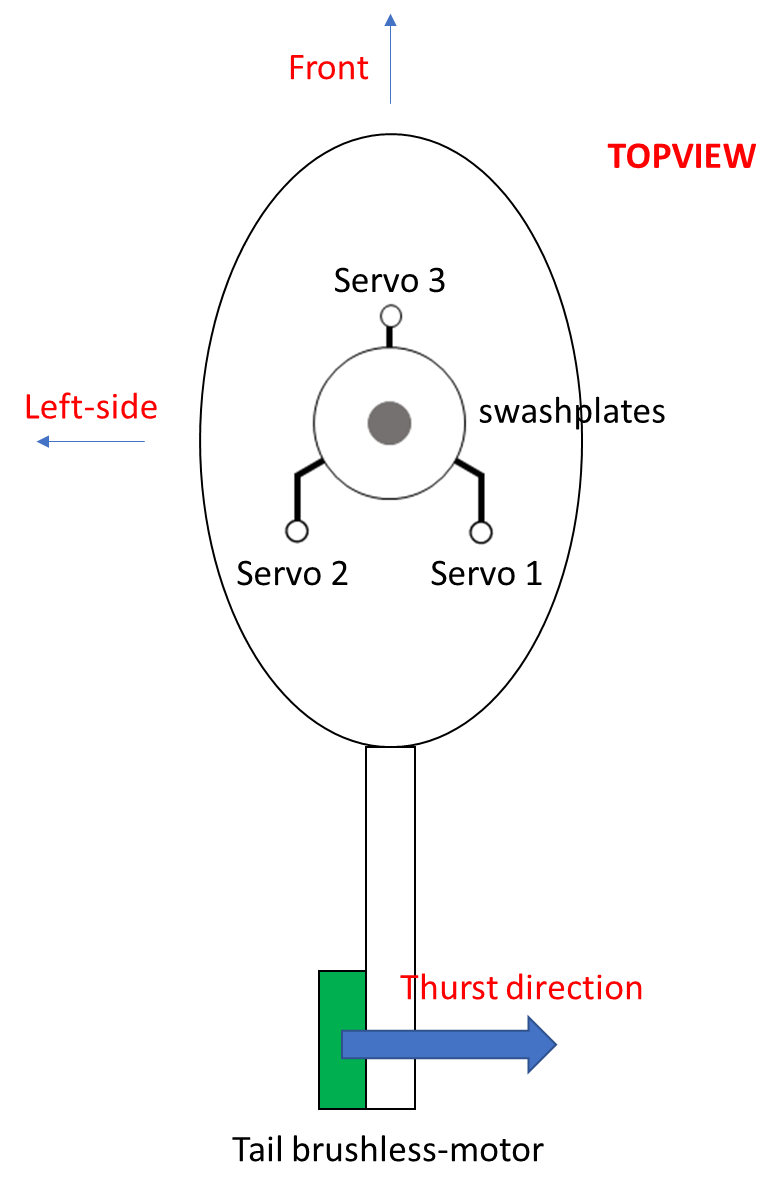
As shown in the above photo, the setup has the H3R-120 swashplates configuration. It uses brushless motor for tail control. The thrust direction is to the left. Therefore, I tried to set the parameters in H_ as follows:
H_SW_TYPE = 3
H_TAIL_TYPE = 4 (since the tail motor would push the vehicle in CCW direction from the top view)
H_SW_COL_DIR =1 (since the servo direction were wrong when I pulled up the throttle stick)
After that, I check the direction of all servos on the ground and was able to confirm:
- The location of each servo 1,2,3 was the same as the photos - 3 in front, 2 on the left and 1 on the right (I checked by disabling each servo output so see if the servo setting were correct or not)
- The movement of 03 servos were correct when I pull up the throttle stick (both raised up if I pulled up the throttle stick)
- The movement of 03 servos were correct when I controlled the elevator and aileron stick (1,2 up and 3 down when pitch up, 2 up and 1 down when roll right).
- The rotation speed of the yaw motor was correct when I use the yaw stick (yaw right and the speed decreased so the tail would move left → nose move right)
- In stabilization mode, the movement of 03 servos were correct when I tried to push the whole airframe pitching up, down and tilt left, right (nose down => 3 up, 1,2 down/ tilt right => 1 up, 2 down for example). The speed of yaw motor was also correct when I moved the tail (speed up when I move the tail to the left)
=> So I think the actuator wiring and parameter setting should not have any problem.
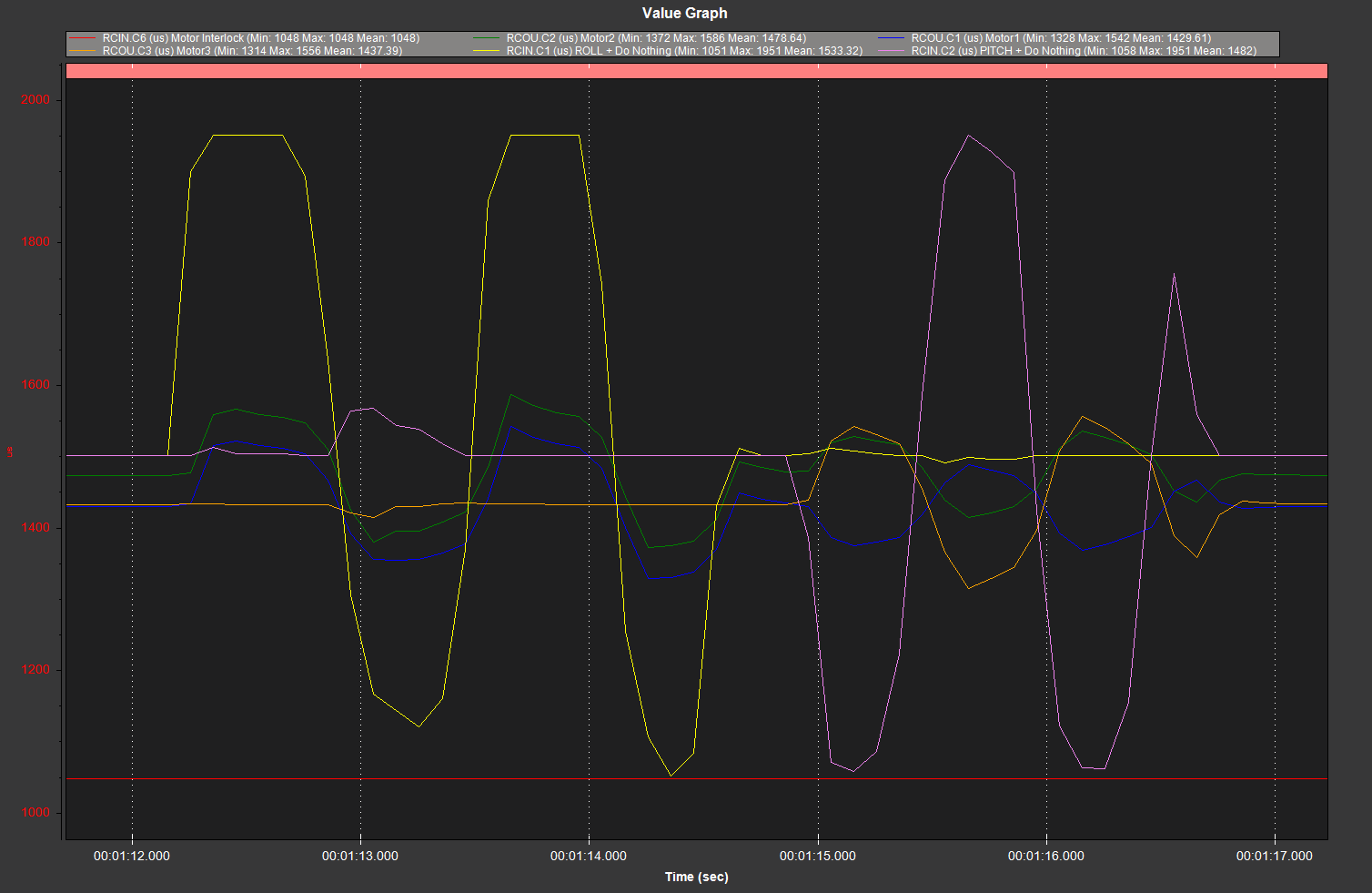
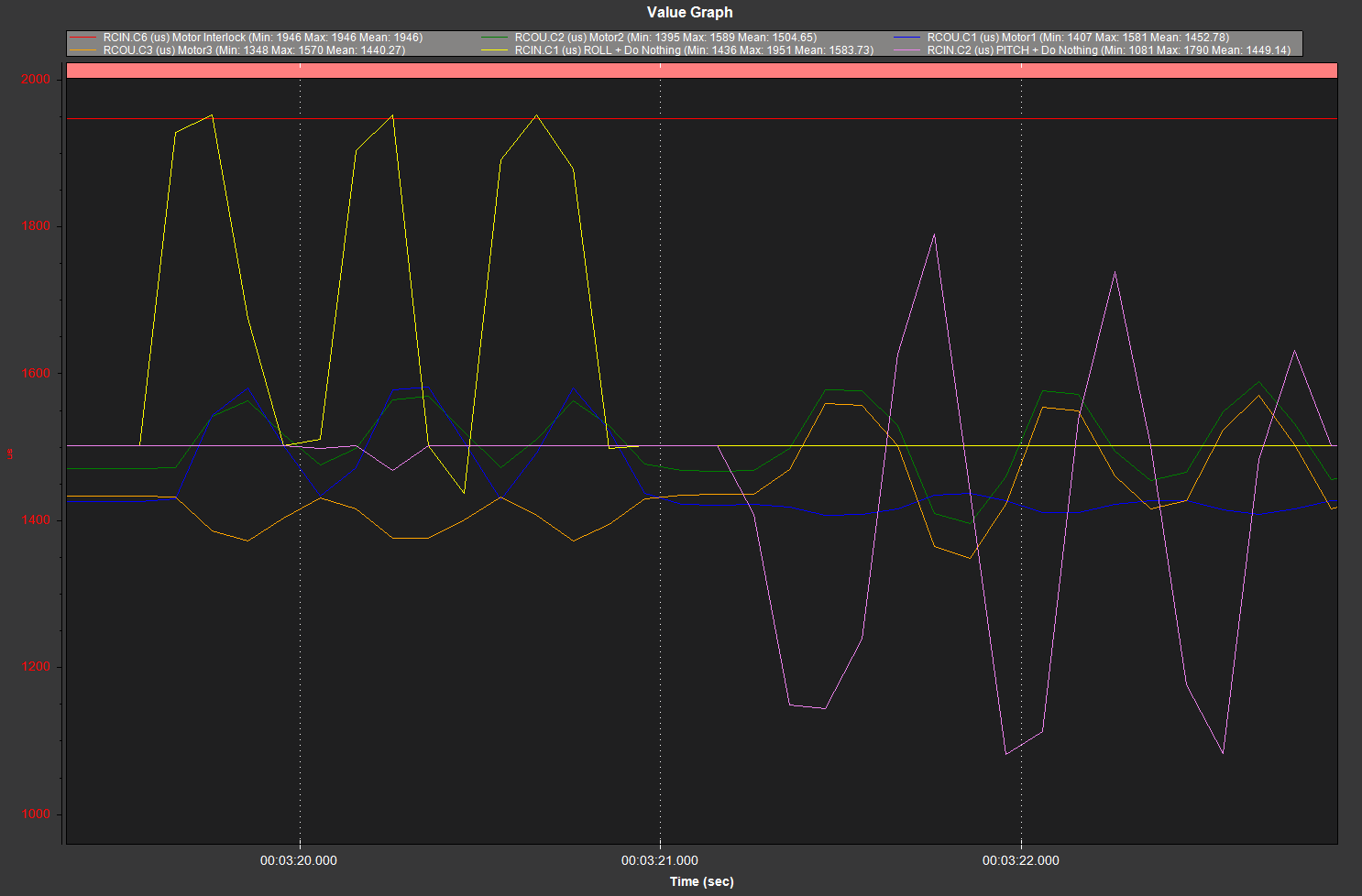
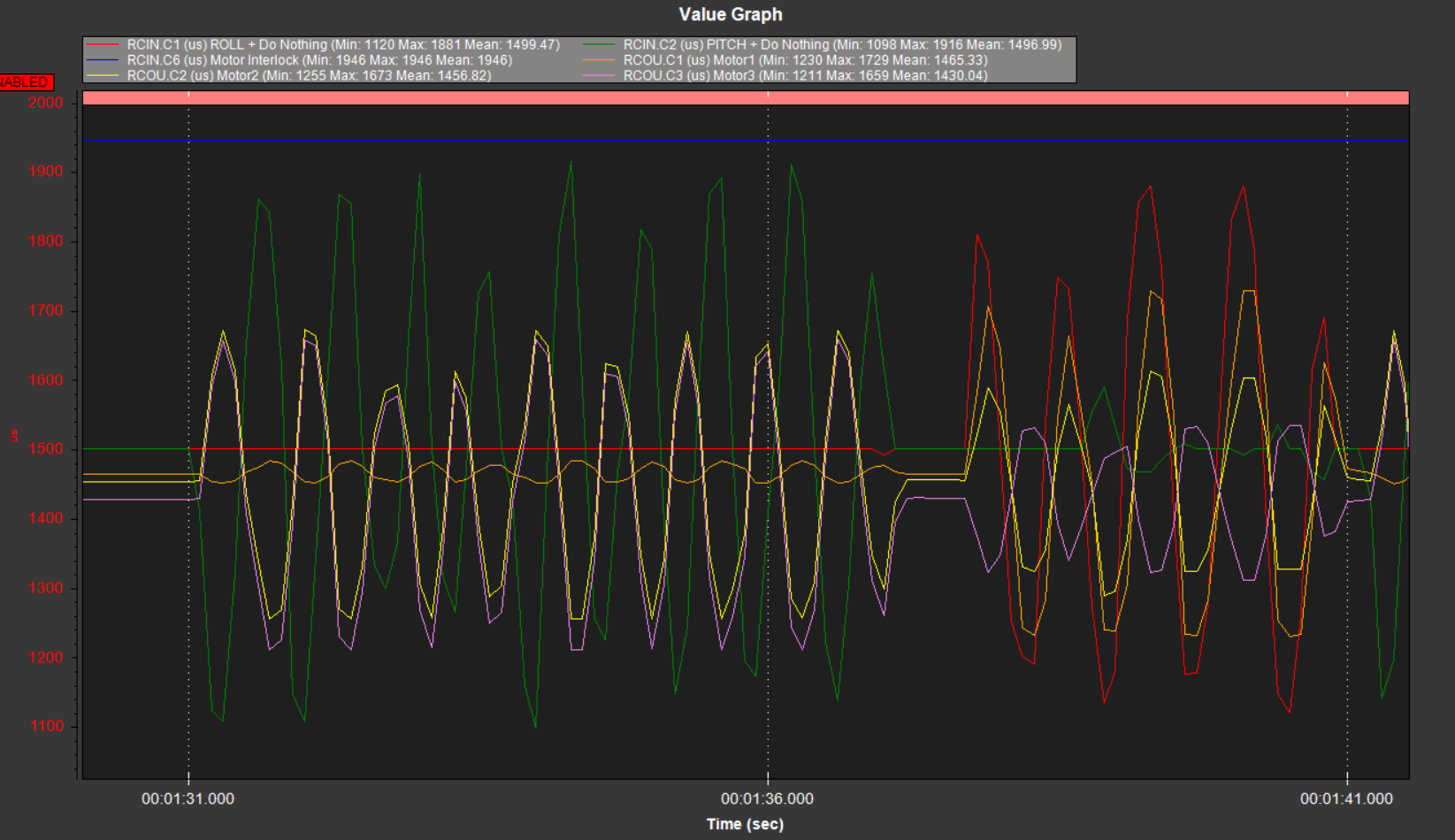
However, as I mentioned in previous post, after I armed the vehicle and do the motor interlock ON, when I pushed the aileron stick, servo 1,2 moved normally. When I pushed the elevator stick up, the servo 3 down and servo 1,2 up, but the servo 1’s movement was much smaller than the servo 2’s movement, so the swashplates also tilted a little right (so sorry I made mistake about servo number in previous post).
As I understand, the difference between movement of servo 1,2 is to against the thrust made by tail motor, so the vehicle would be stable in left-right movement, is that correct? However, in my current setup, both tail motor thrust and the tilt angle of swashplates would make the helicopter move to the right, not to balance the vehicle. Could you please help me to confirm if there were any thing wrong with my setting?
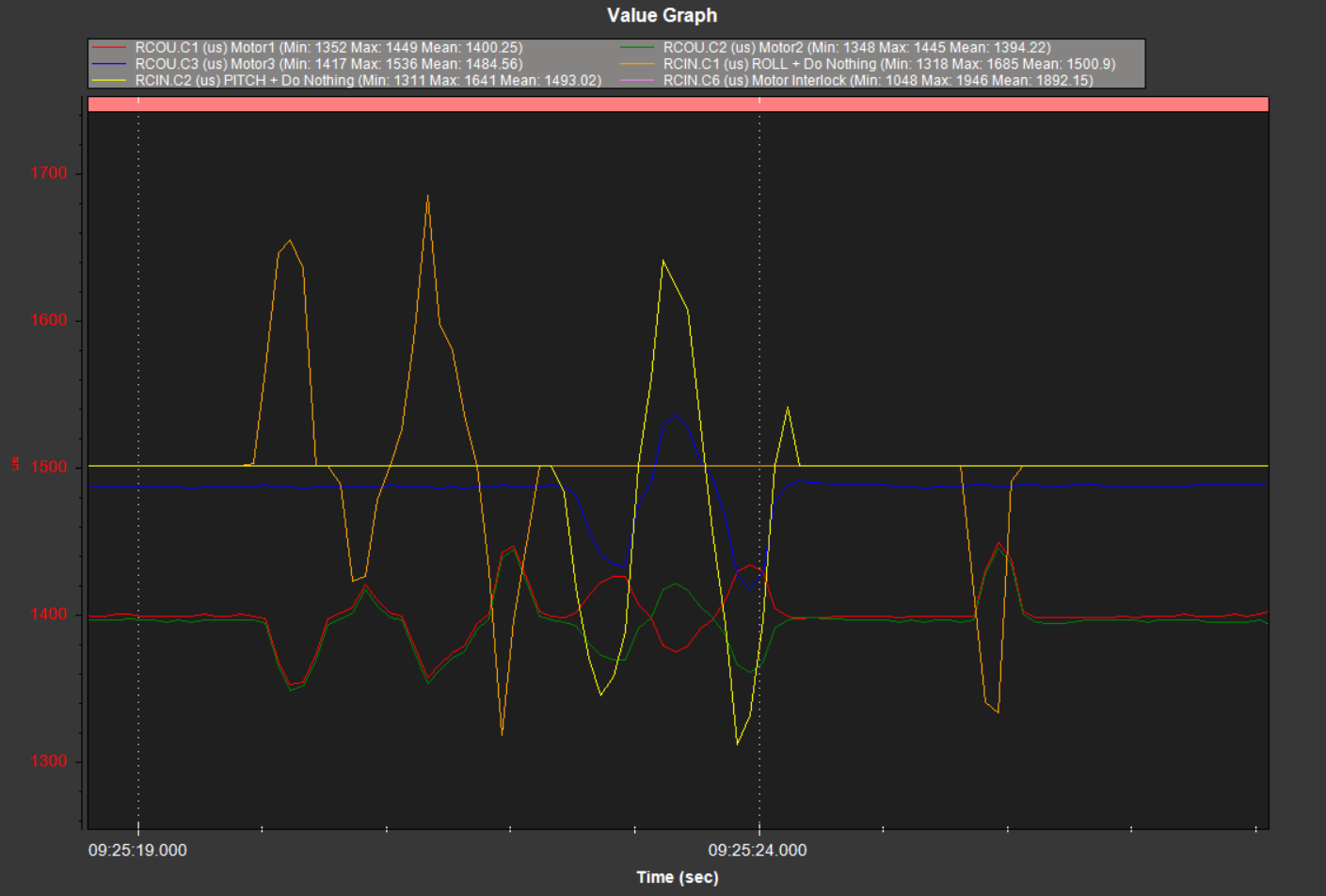
P/S: this helicopter is my friend’s and I’m helping him to setup an autopilot on it. In fact, we successfully flied it in stabilization mode one time with Arduheli (the vehicle could take-off and hover for a few minutes manually, you can check the flight log for more info. In this log, in 09:25:19, we did some servos test before flight and both servo 1 and 2 moved normally (same amount) when we pushed the elevator stick. (https://drive.google.com/file/d/1a6QFr7rB7CnyWsavv72NRosqhD0KGf8p/view?usp=sharing).
However, the old servos failed and we had to change all of them with newer and better ones. After installing new servos, all servo movement were wrong and we had to reverse the direction by mission planner.