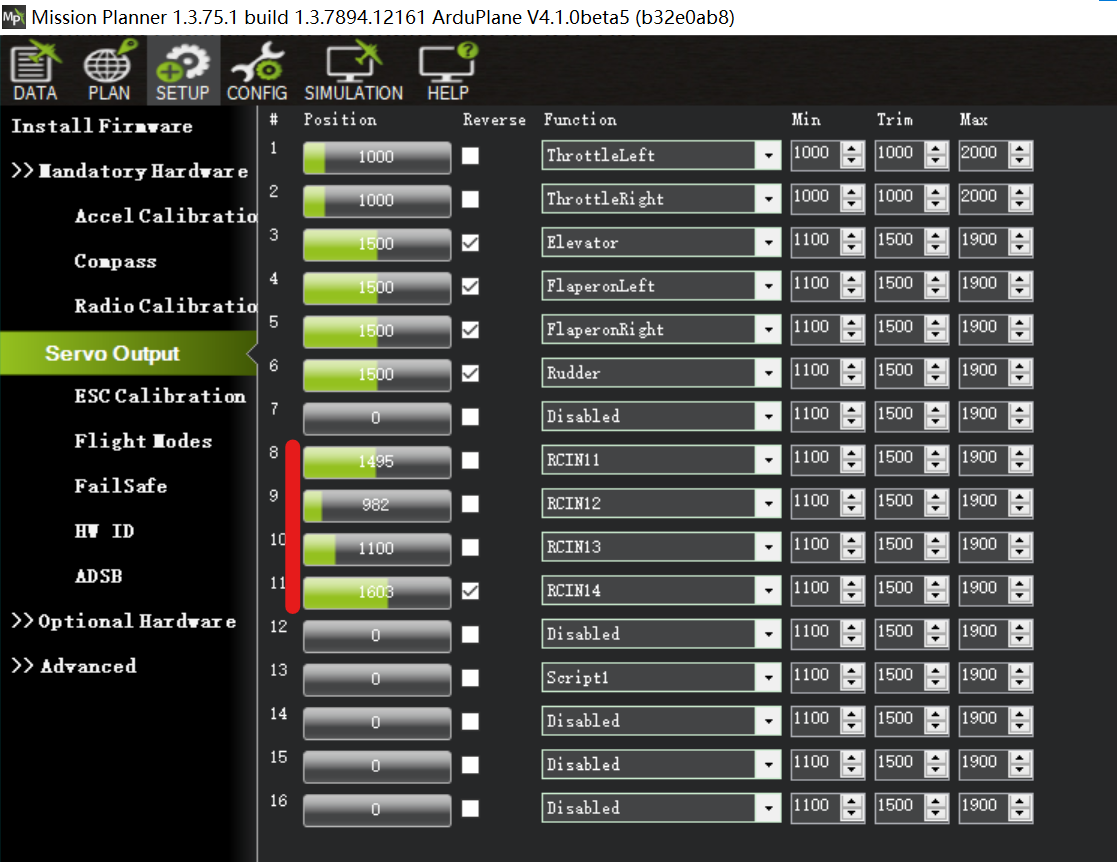
The min, trim, max, and the reverse does not respond the change other than AETR channels. Can anyone tell me, what did I miss here.
have you set BRD_PWM_COUNT=8
Thank you and I tried. and RCpassthru,it did not work.
well i just did some testing you cant set servo trim or min or max or center when its set to RCIN
if set it RCIN or RC passthrough you need to use your transmitter to set min or max or center or reverse
with your transmitter
So as it says RC passthrough / RCIN so the Flight controller has no control over servos you radio does
set BRD_PWM_COUNT=8 doesn’t change that.any other solution that I can refer?
read the message i wrote
I am currently using transmitter to control the servo min max and trim. But I need flight control to have this min max trim. I have a servo gamble that I need pwm from 500 to 2500 for its pan. I’m sorry, I did not to see the solution from the message you left.
what type of gimble ?
have read here to setup your gimbal
https://ardupilot.org/plane/docs/common-camera-gimbal.html
as soon as you set it up you need to reboot for the controller to make the changes
it is a servo gimble like this
I have tried this setup before. the pan/tilt control were lost once it set…but I will try it again.
Can you tell me how to have Flight Control to have servo min max trim. sorry for ask this again. I probably missed something earlier.
Have a read here
I have read it again. and set it working now. as I have set the servo range from 500-2500 to have wider pan. the trim seems can’t set at the right front view. so I tried to adjust trim and Neutral Angles. neither of it works. don’t know why.
Beside. I still would like to have the servo output to be adjusted other than this gimble solution.