We are flying a mission to photograph a gas pipeline in Thailand. Yesterday we had a serious problem with our mission.
All was going well, until we reached waypoint #50.
The airplane started to become extremely unstable, banking left and right and getting sometimes into a spiral downwards. On top of that, the camera stopped making pictures, although the logfile shows pictures are being triggered until waypoint 51.
The behavior became worse and when we almost reached home, we took over with FBWA. Within sight, we noticed the spiral down again and switched to QHOVER. The plane stabilized, but unfortunately, the airplane disappeared behind trees and we crashed.
Luckily we did not damage any third party properties, but the aircraft was damaged beyond repair.
I have been analyzing the logfile, but I cannot find the root cause of this problem. We noticed we had bad compass health, but looking at the EKF, we did not see anything. Also, everything went perfectly OK until waypoint 50
Please help, this looks like a serious problem to me.
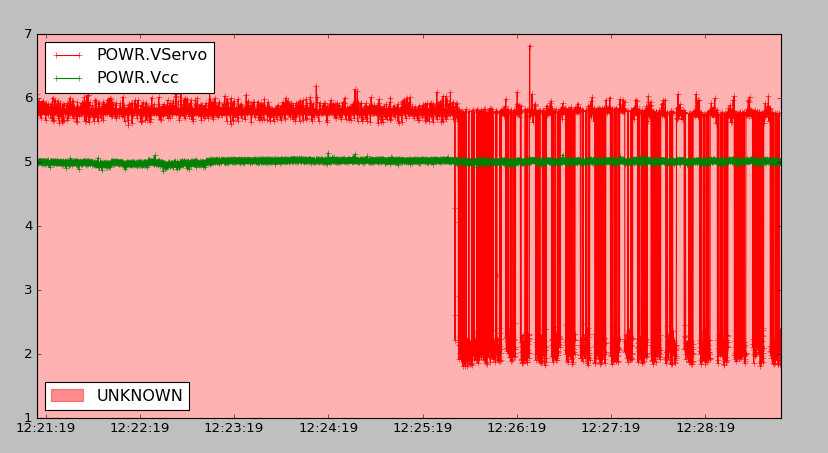
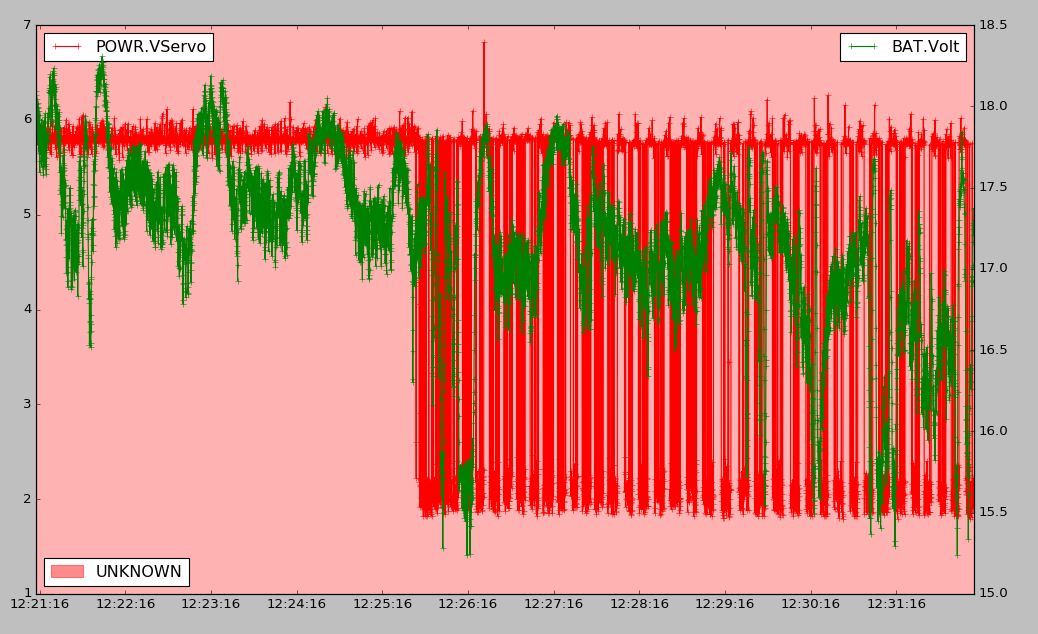
you can see that your servo voltage went from 5.9V to 1.8V, then started switching between the two voltages. Do you have two voltage regulators connected to the same servo rail?
Thanks very much. No, we use only 1 voltage regulator. I have to think about redundancy. So obvious and I didn’t look the servo voltage, feel a bit stupid.
two voltage regulators isn’t necessarily better, as two switching regulators can fight each other.
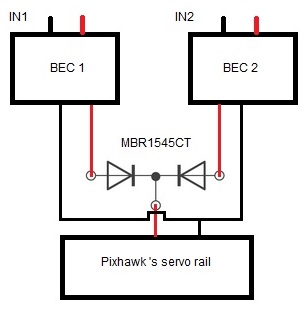
There are systems out there that allow for redundant servo power (basically combine two regulators with some diodes).
Also, the problem wasn’t necessarily with the regulator. You may have had an intermittent short, or a servo failing in a nasty way.
The servo that pushes the shutter button of the Sony A5100 died and created the short. It worked well for almost 20000 pictures…
Even so, the plane was still able to fly almost 10km. Amazing and to me, this is evidence of how robust and reliable the Pixhawk is. We are using original pixhawk 2.1
I do have a question though:
Is it possible to get a warning on the screen for this kind of error?
I also got the compass health error, but that didn’t affect the flight at all. How is that possible?
Hey Ton,
So sorry to here about your crash, I know how careful you are to build a reliable system. Why do you use a servo to trigger the a5100 rather than a relay on the MultiPort connector?
Also, in your next design, depending on how much it costs for you to build these and what the ramifications are for one crashing (loss of plane, damage to property, loss of life, etc) take some design tips from the aviation world.
Separate the power sources of your flight critical systems from your mission-critical systems from your non-critical systems.
Obviously the flight critical systems are most important. So your flight controller, flight control surfaces, powerplant, GPS, etc. Just enough to RTL.
Mission critical are your systems needed to perform a specific mission (camera and such)
non-critical: these differ based on the platform. on a full aircraft landing gear is pretty darn critical. On a light weight plane that “could” belly land, then retractable gear may not be critical (all depends on design). You may not end up having anything that fits in the non-critical category of course. For a C-130, lighting in the bathroom is fairly non-critical.
while the systems won’t be totally disconnect (communication from flight controller to camera shutter relay) having separated power rails for the non flight-critical systems could prevent such an occurence in the future.
@kikislater. Thanks a lot. I did find that option, but didn’t realise it could be modified to be compatible with pixhawk. I’ll implement it right away.
@lordneeko. Yes, totally agree. Already doing that but need to separate more. We don’t have a bathroom on our UAV, but totally get your point. Thanks.
I would like to thank all of you for your contributions to my problem.
I’d like to share what we did to prevent another catastrophic failure:
Followed the advice to separate equipment.
Got rid of the shutter servo. I implemented the solution on the multiport. I found a mistake in that design as well. The signal from the pixhawk is logical low, and goes to high during trigger. The A5100 works opposite, so I added a transistor to invert the signal. Even better, because now the multiport is separated from the pixhawk through a 47K base resistor. The collector goes directly to the shutter as the A5100 has internal pull up.