I’m using CUAV V5+ with Neo v2pro CAN gps on T.Drone M690PRO quadcopter .
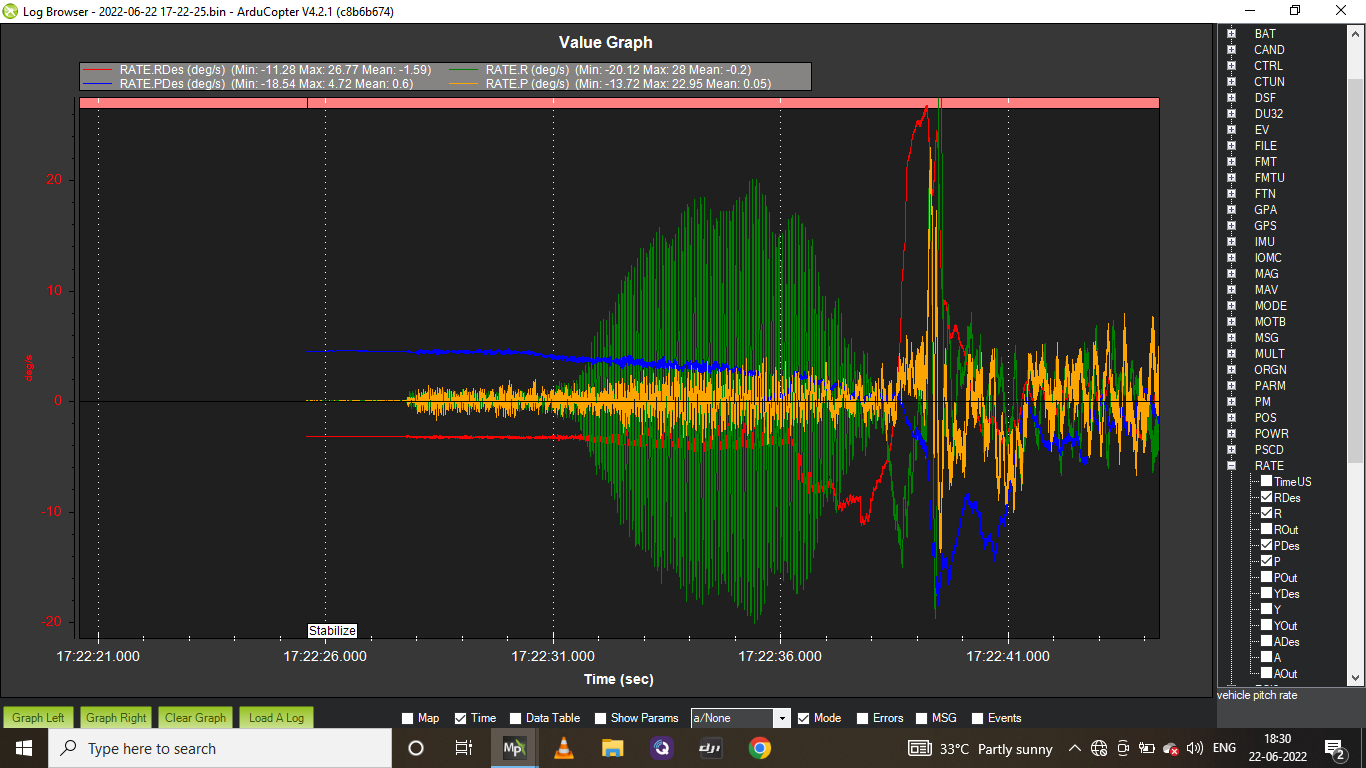
Vibrations are still ok but i have a problem that during takeoff in stabilize mode there is more oscillation in both pitch and roll axis.
folder has two file
1.High oscillation : this is initial flight i did with slow throttle raise caused high oscillation.
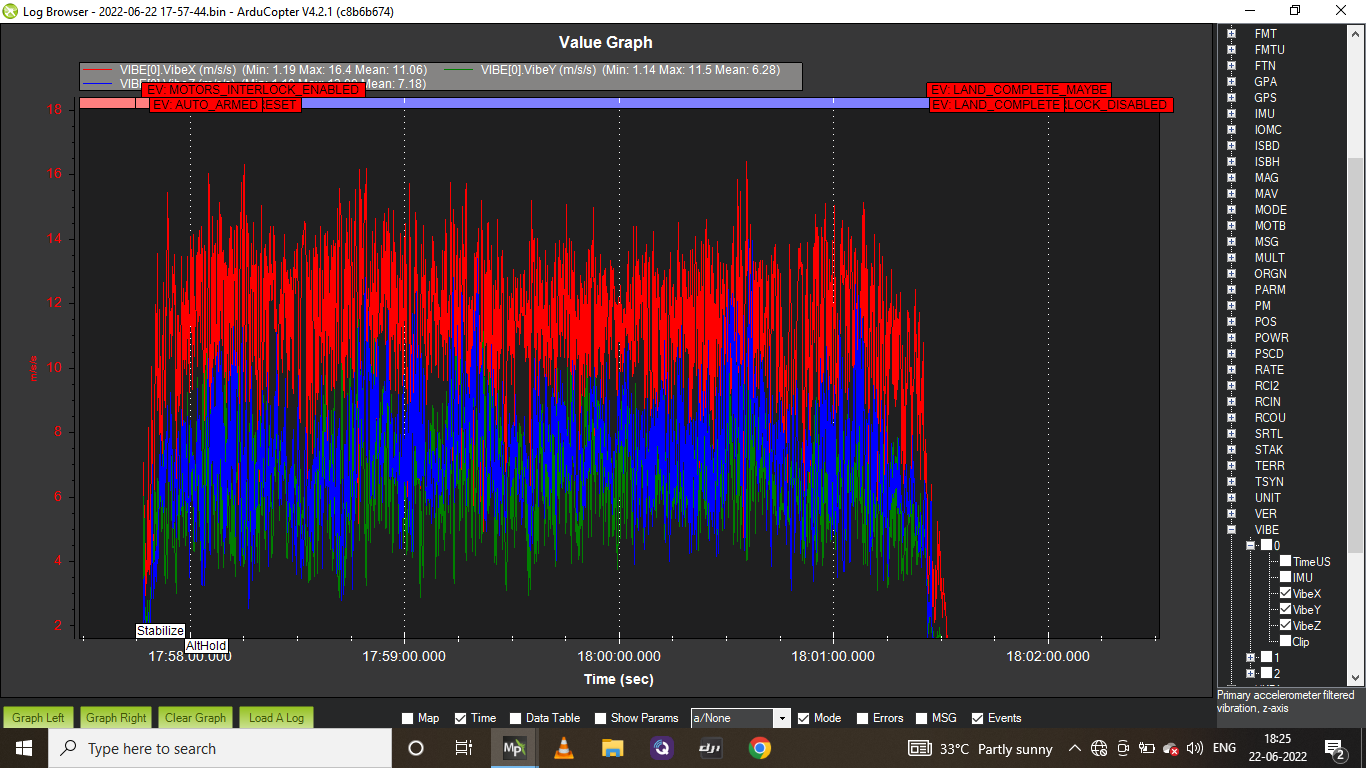
Little low oscillation : this is second flight with little quickly increased throttle but still caused oscillation while takeoff.
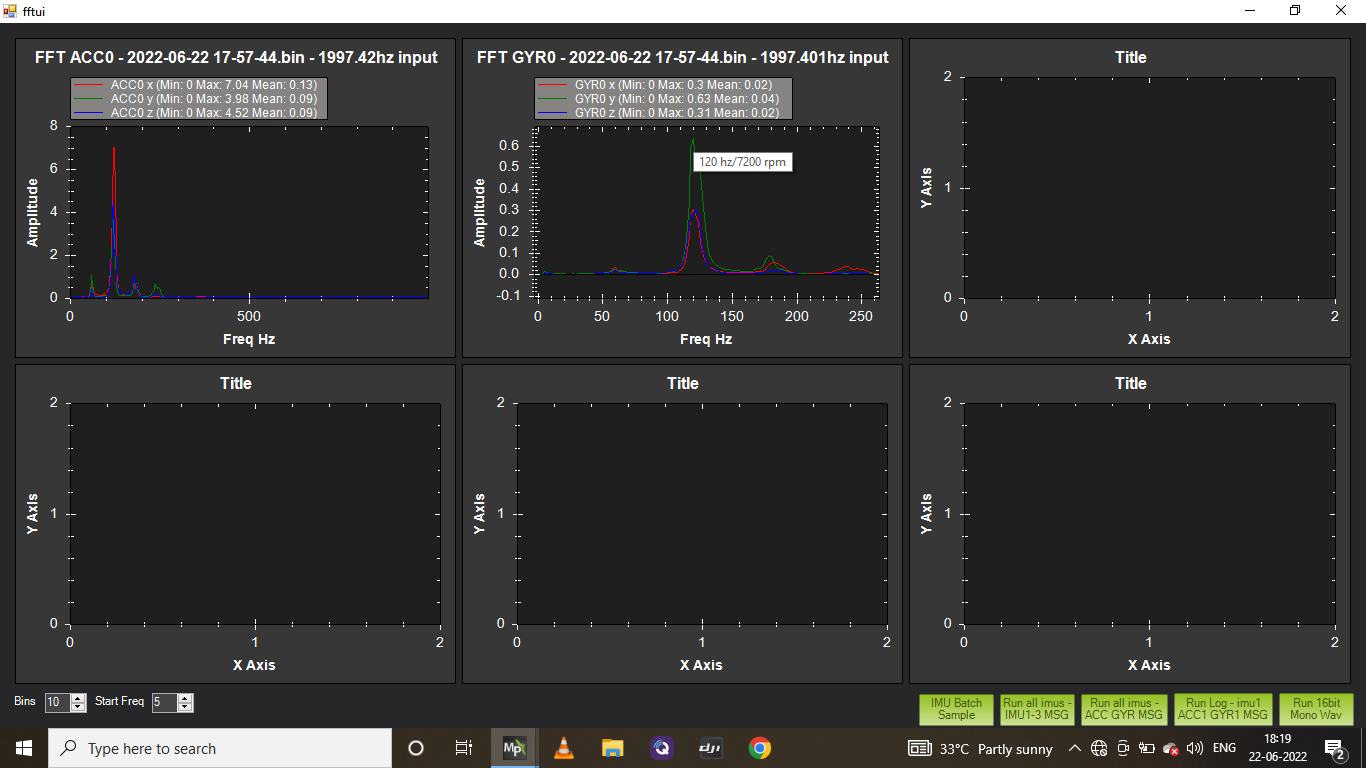
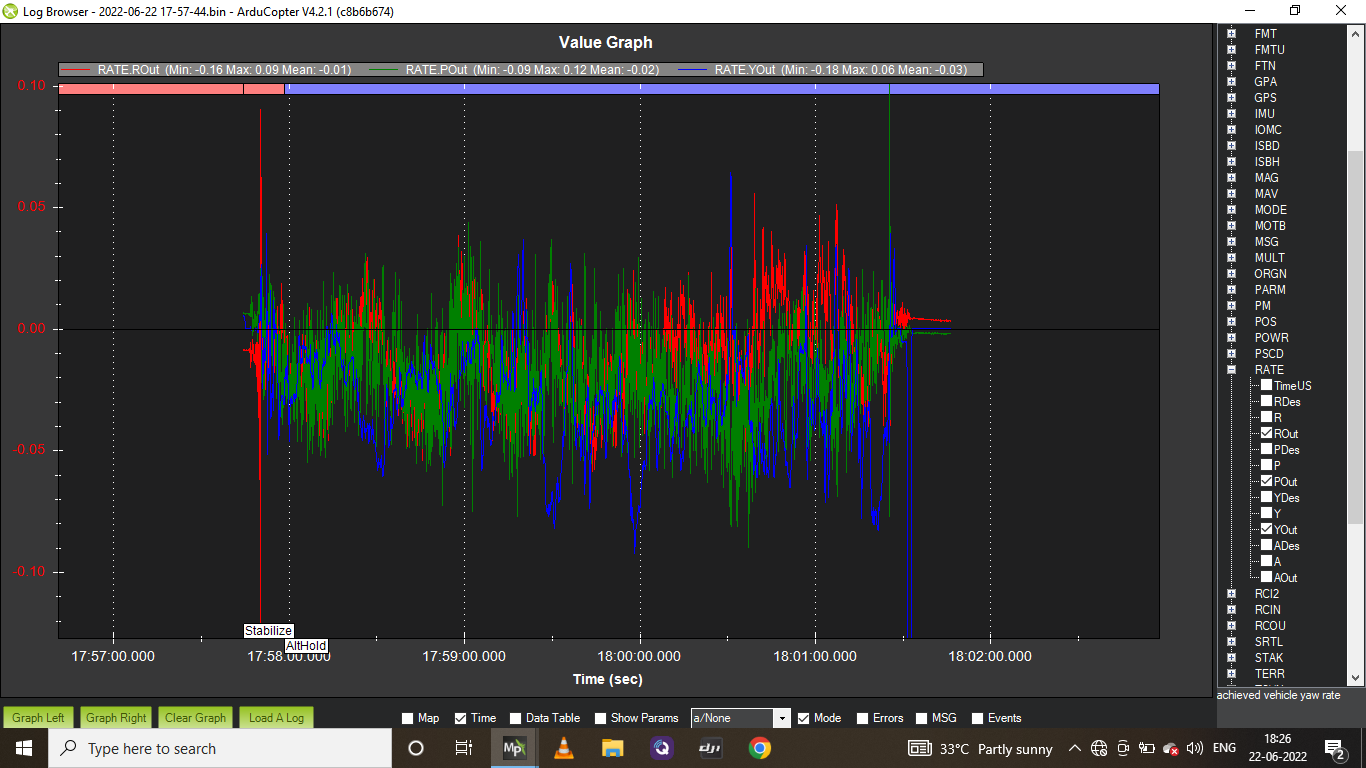
the same flight used for collect IMU sample to setup the harmonic filter .
I see the oscillations you are worried about.
Sometimes this is due to long or wobbly landing gear, or the ESCs and motors are starting up very fast to a higher RPM than needed.
There’s more tuning to be done though, and it might even be eliminated in that process or at least we will have a better chance of fixing it.
Connect to MissionPlanner and do the Initial Parameters by entering your prop size and correct battery cell information. Accept all the settings it offers and also set BATT_FS_CRT_ACT,1
For the Harmonic Notch filter start with these, then do another hover test flight and just a few gentle movements. Let’s see that log file to verify the correct settings.
INS_HNTCH_ENABLE,1 ← set this then refresh params to see the rest
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.21
INS_HNTCH_FREQ,60
INS_HNTCH_BW,30
INS_HNTCH_ATT,40
INS_LOG_BAT_OPT,2
Once the HNOTCH is working OK you’ll be able to move onto Autotune. Feel free to post a new log at each stage though, so we can help you if required.
@xfacta
i have Autotuned all axis with M690Pro successfully.
After autotuned quad flies very well and stability is great but still there is little high oscillation during takeoff phase after initial took off done that oscillation goes off.
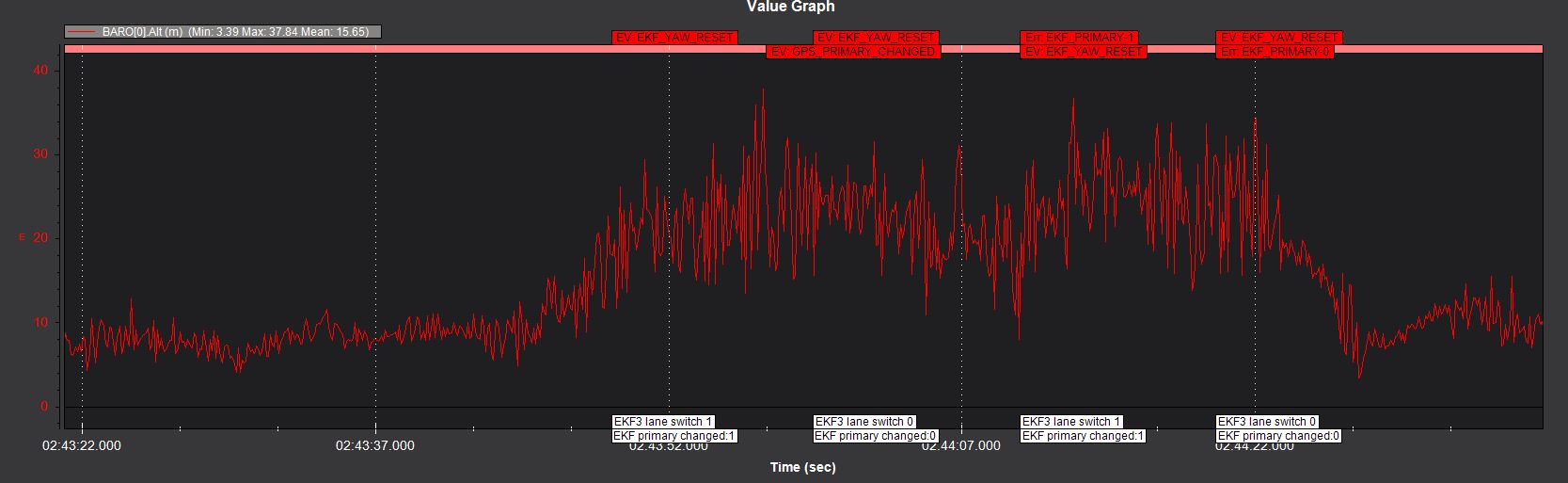
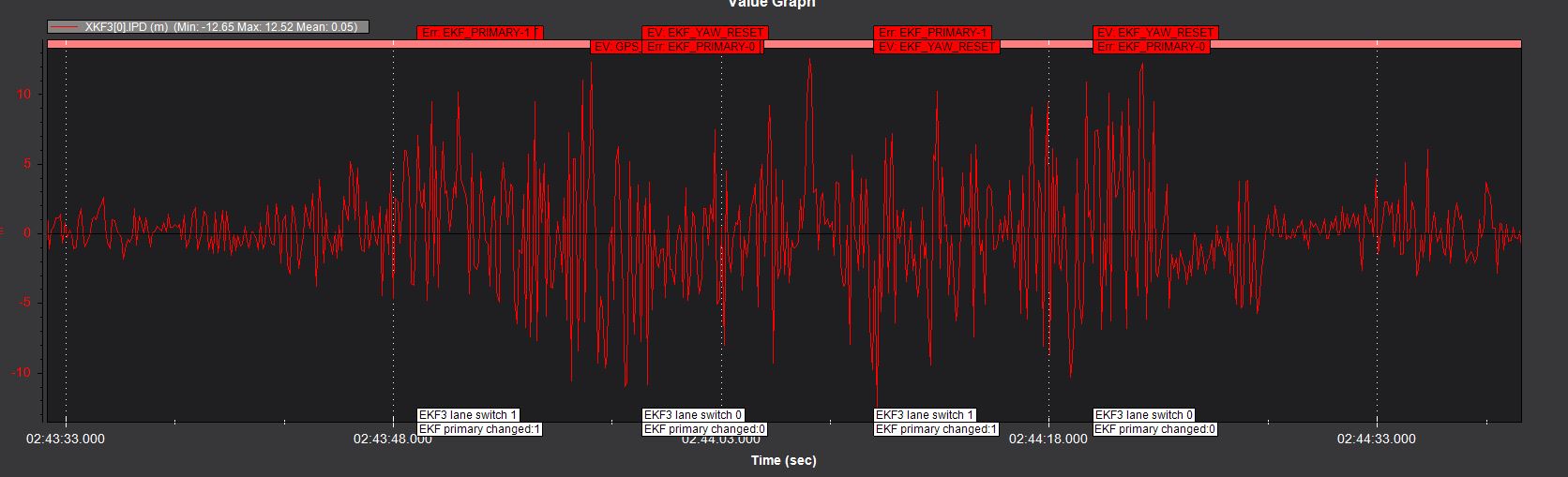
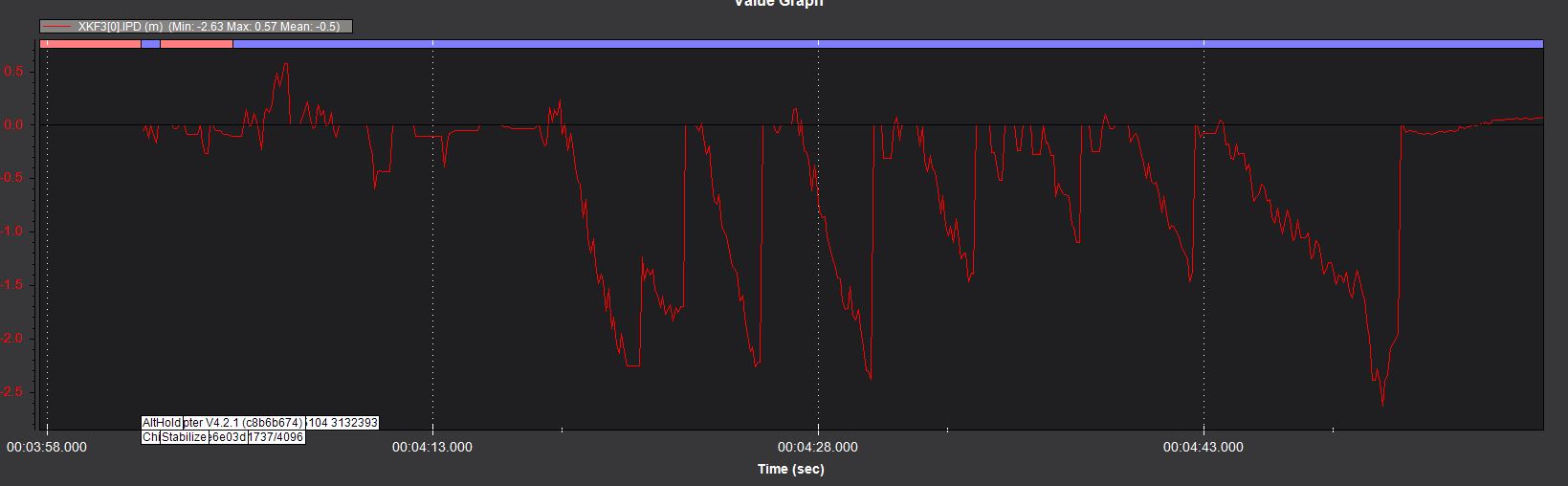
i have another serious issue on EKF.
1.EKF keep changing PRIMARY between 0 and 1 .
2. EKF LANE switching.
3. EKF POSITION VERT( goes to RED warning level 0.8) keep getting disturbed while flying and braking stage of Quadcopter . but still compass is relaxed only no external interference while flying also.
what cause these EKF issues?
there is no vibration.
i have replaced GPS mast from default. it was carbon fiber tube ,i have replaced with aluminum tube with increased mast height but still getting EKF issues.
here is the installed gps mast photo