I’m developing UAV Control Algorithm with MAVROS by using ArduCopter - Gazebo SITL.
The default sensor refresh rate(ex. GPS) is too slow, i tried to increase the refresh rate by this command
rosrun mavros mavsys rate --all 50
But this command increases the sensor rate temporary, and reverted to 4Hz.
Here is the terminal log.
Lenovo-ThinkBook-16p-Gen-2:~$ rosrun mavros mavsys rate --all 50
Lenovo-ThinkBook-16p-Gen-2:~$ rostopic hz /mavros/global_position/raw/fix
subscribed to [/mavros/global_position/raw/fix]
WARNING: may be using simulated time
average rate: 50.205
min: 0.011s max: 0.028s std dev: 0.00470s window: 50
average rate: 50.025
min: 0.011s max: 0.031s std dev: 0.00448s window: 100
average rate: 49.950
min: 0.011s max: 0.031s std dev: 0.00442s window: 150
average rate: 50.013
min: 0.011s max: 0.031s std dev: 0.00438s window: 200
average rate: 49.980
min: 0.011s max: 0.031s std dev: 0.00437s window: 250
average rate: 49.950
min: 0.011s max: 0.031s std dev: 0.00445s window: 300
average rate: 49.950
min: 0.011s max: 0.031s std dev: 0.00432s window: 350
average rate: 49.950
min: 0.011s max: 0.031s std dev: 0.00425s window: 400
average rate: 49.955
min: 0.007s max: 0.031s std dev: 0.00430s window: 450
average rate: 47.556
min: 0.007s max: 0.257s std dev: 0.01593s window: 466
average rate: 43.511
min: 0.007s max: 0.257s std dev: 0.02638s window: 470
average rate: 40.139
min: 0.007s max: 0.257s std dev: 0.03357s window: 474
average rate: 37.312
min: 0.007s max: 0.257s std dev: 0.03923s window: 478
average rate: 34.885
min: 0.007s max: 0.257s std dev: 0.04406s window: 482
average rate: 32.786
min: 0.007s max: 0.257s std dev: 0.04827s window: 486
average rate: 30.983
min: 0.007s max: 0.257s std dev: 0.05190s window: 490
average rate: 29.366
min: 0.007s max: 0.257s std dev: 0.05530s window: 494
average rate: 27.939
min: 0.007s max: 0.257s std dev: 0.05836s window: 498
average rate: 26.662
min: 0.007s max: 0.257s std dev: 0.06119s window: 502
average rate: 25.521
min: 0.007s max: 0.257s std dev: 0.06378s window: 506
average rate: 24.484
min: 0.007s max: 0.257s std dev: 0.06620s window: 510
average rate: 23.538
min: 0.007s max: 0.257s std dev: 0.06850s window: 514
average rate: 22.681
min: 0.007s max: 0.257s std dev: 0.07061s window: 518
average rate: 21.896
min: 0.007s max: 0.257s std dev: 0.07260s window: 522
average rate: 21.174
min: 0.007s max: 0.257s std dev: 0.07447s window: 526
average rate: 20.510
min: 0.007s max: 0.257s std dev: 0.07623s window: 530
average rate: 19.886
min: 0.007s max: 0.259s std dev: 0.07796s window: 534
average rate: 19.321
min: 0.007s max: 0.259s std dev: 0.07950s window: 538
But soon i realized that i should change the default param( in ardupilot/Tools/autotest/default_params/gazebo-iris.parm) concern to sensor refresh rate.
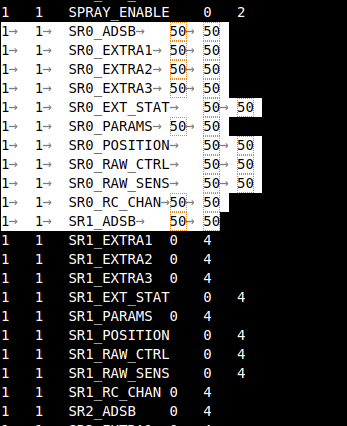
But even though I changed the default parameter as 50Hz, when i run the SITL once again, the parameter i changed is reverted as 4Hz.
Moreover, when i update the parameter manually in GCS Program(connected by UDP Progtocol with SITL), the certain paramter i changed is reverted …
What’s the problem??
And is there any different ways to increase the refresh rate permanently??