I have firmware version 4.5.0. I am going to use the following functions to get the distance from the sensor and send it to the flight control by serial.
-- find serial Defined As
local port = serial:find_serial(0)
--find Terrain Sensor Backend
local terrainSensor = rangefinder:get_backend(0)
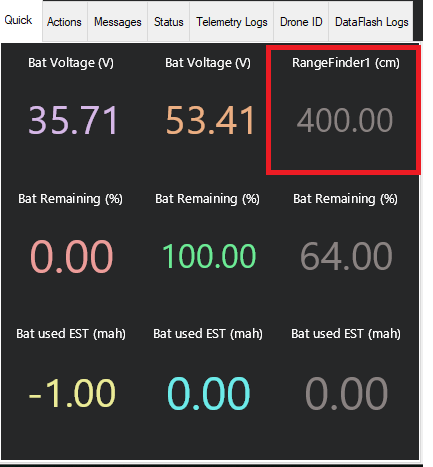
local define_distance = 400
-- connect to the Serial port
port:begin(57600)
port:set_flow_control(0)
function rangefinder_data()
if port:available() > 0 then
if terrainSensor ~= nil then
terrainSensor:handle_script_msg(define_distance / 100)
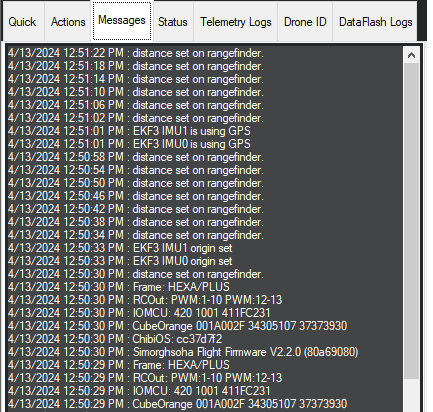
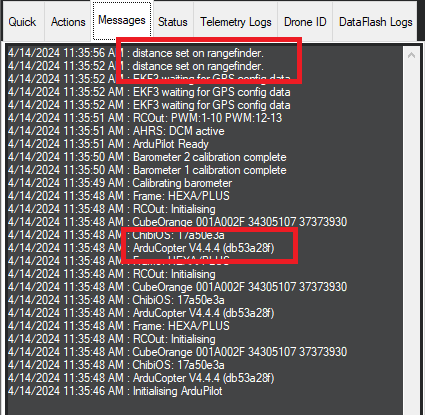
gcs:send_text(6,"distance set on rangefinder.")
end
end
return rangefinder_data , 4000
end
return rangefinder_data , 1000
The parameters I set:
SERIAL2_PTOROCOL = 28
RNGFND1_TYPE = 36
RNGFND1_ORIENT = 25
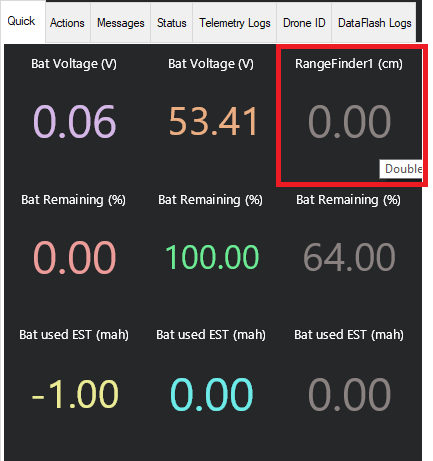
My script runs correctly in version 4.5.0, but in version 4.6.0, the sensor distance is not sent to flight control.
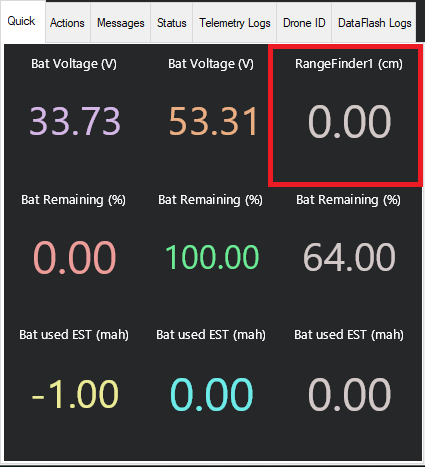
output Script in Version 4.5.0:
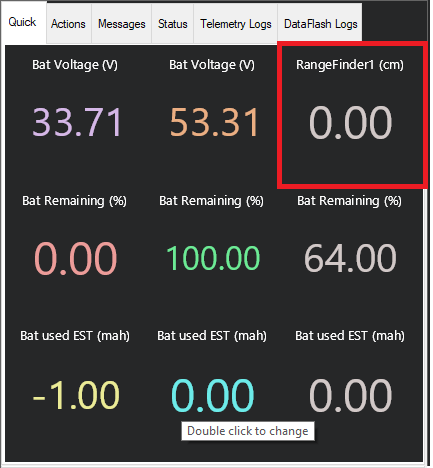
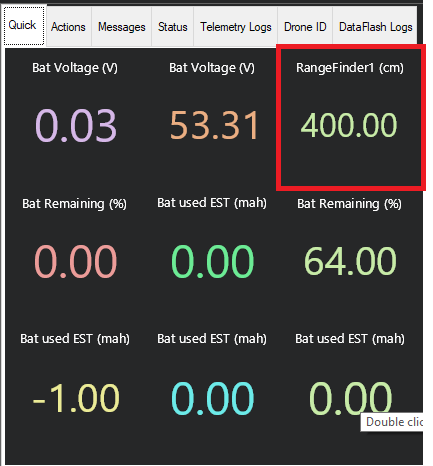
output Script in Version 4.6.0:
and We can see the debug text, this means there is no problem in the execution.
Can you help me how to get the sensor distance with serial and send it to the flight control in the new version?
you are using the modified Firmware , please test your script with legacy version and install latest firmware release from Mission Planner on your bord and repost the result .
I checked this by myself and this bug is true .
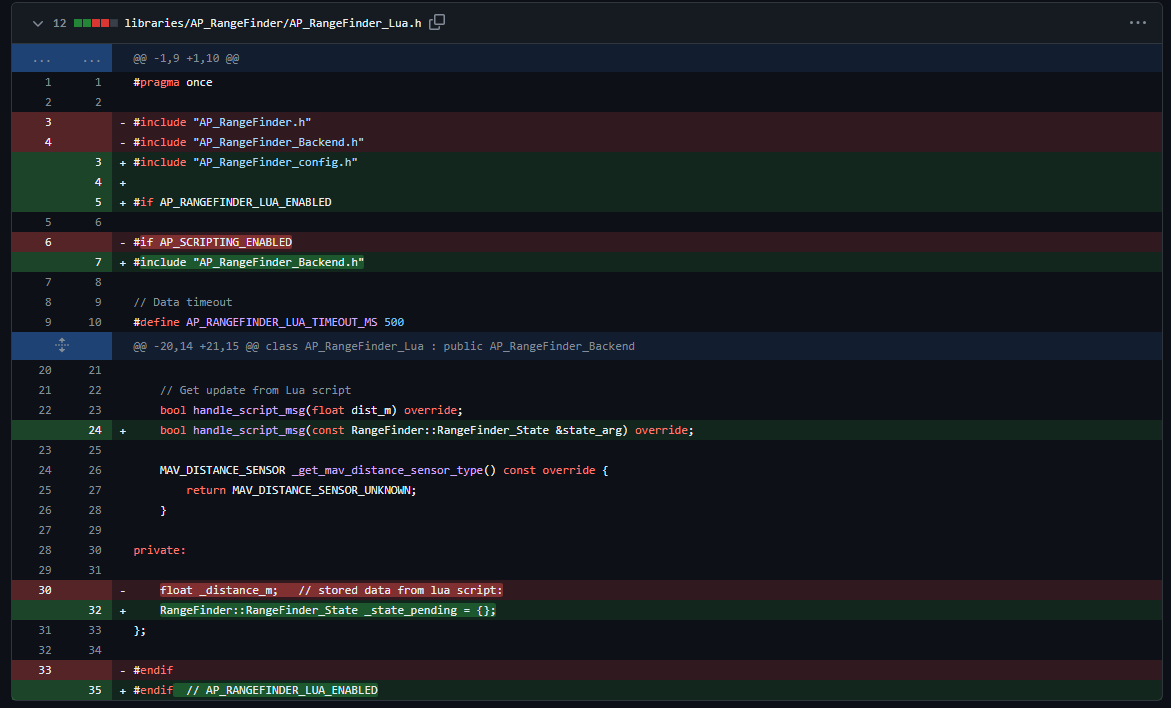
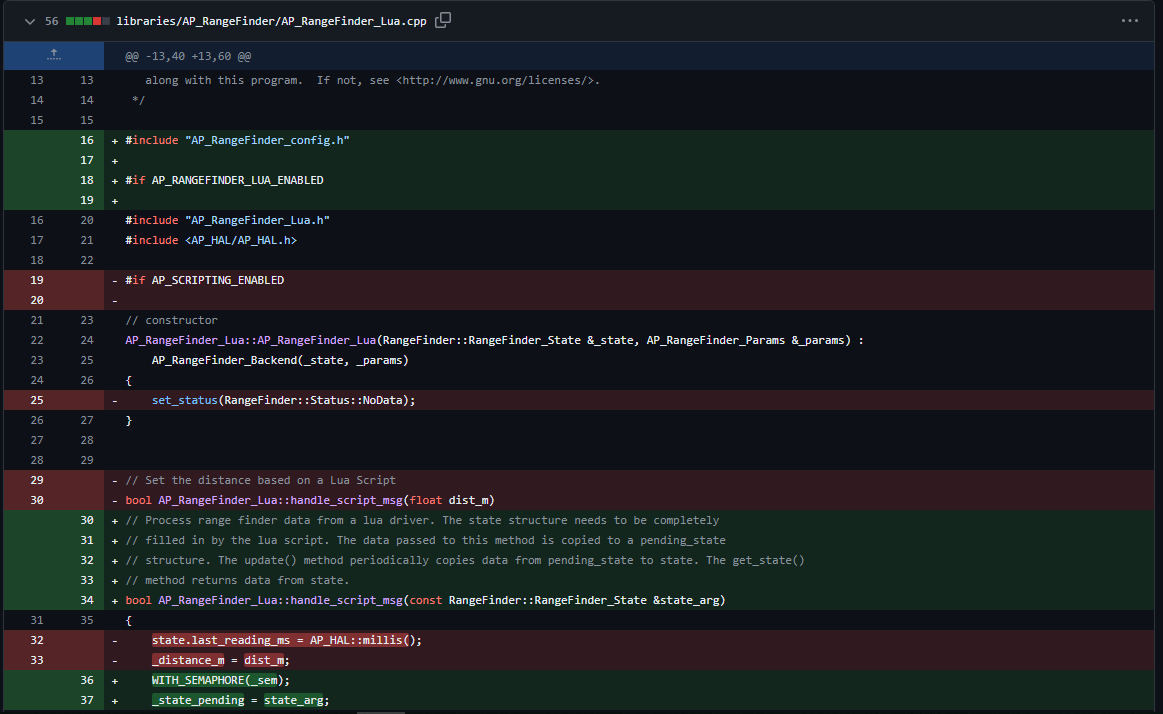
this function is changed in recently release in AP_RangeFinder_Lua.cpp
// Process range finder data from a lua driver - legacy interface. This method takes
// a distance measurement and fills in the pending state structure. In this legacy mode
// the lua script only passes in a distance measurement and does not manage the rest
// of the fields in the state structure.
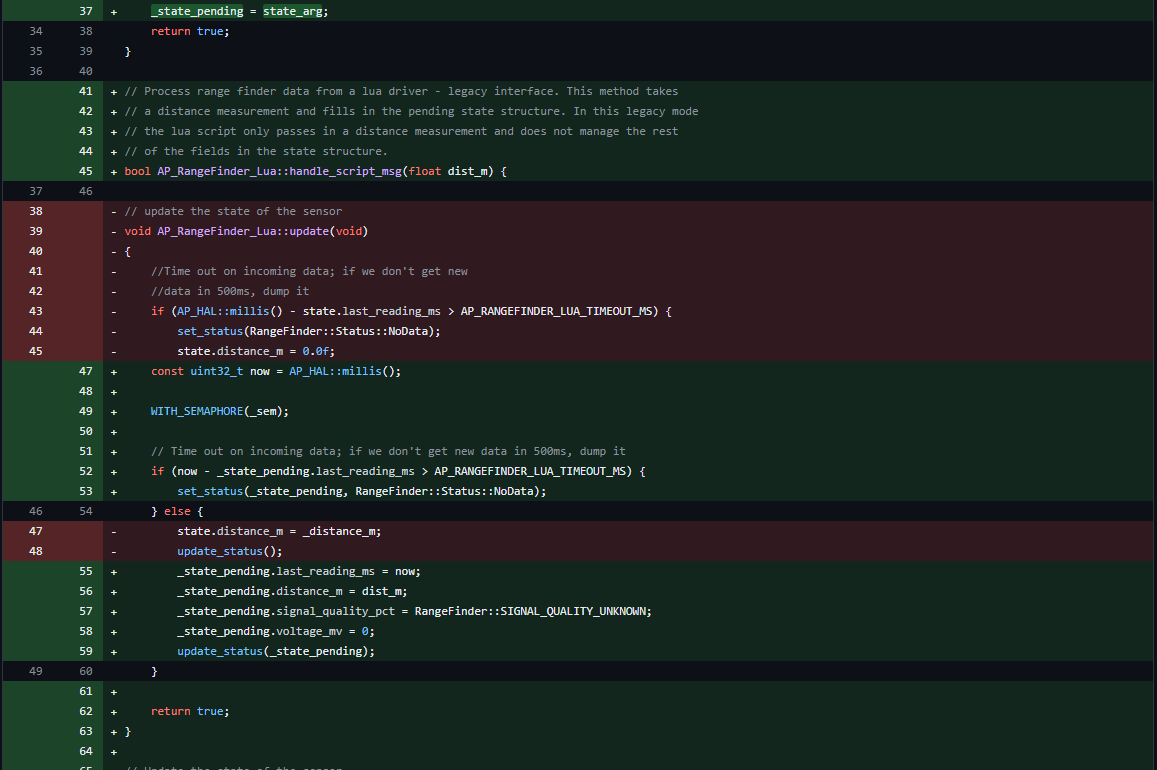
bool AP_RangeFinder_Lua::handle_script_msg(float dist_m) {
const uint32_t now = AP_HAL::millis();
WITH_SEMAPHORE(_sem);
// Time out on incoming data; if we don't get new data in 500ms, dump it
if (now - _state_pending.last_reading_ms > AP_RANGEFINDER_LUA_TIMEOUT_MS) {
set_status(_state_pending, RangeFinder::Status::NoData);
} else {
_state_pending.last_reading_ms = now;
_state_pending.distance_m = dist_m;
_state_pending.signal_quality_pct = RangeFinder::SIGNAL_QUALITY_UNKNOWN;
_state_pending.voltage_mv = 0;
update_status(_state_pending);
}
return true;
}
As you can see in the following Function
_state_pending.last_reading_ms never update if
// Time out on incoming data; if we don't get new data in 500ms, dump it
if (now - _state_pending.last_reading_ms > AP_RANGEFINDER_LUA_TIMEOUT_MS) {
set_status(_state_pending, RangeFinder::Status::NoData);
}
happend
so Data will never Apply on _state_pending
in other hand why we have to check time out on handle_script_msg ?!
this function called when valid data is sent from script and backend must put the data on line not check the time out !!
I will modified this and reply the result
// Process range finder data from a lua driver - legacy interface. This method takes
// a distance measurement and fills in the pending state structure. In this legacy mode
// the lua script only passes in a distance measurement and does not manage the rest
// of the fields in the state structure.
bool AP_RangeFinder_Lua::handle_script_msg(float dist_m) {
const uint32_t now = AP_HAL::millis();
WITH_SEMAPHORE(_sem);
_state_pending.last_reading_ms = now;
_state_pending.distance_m = dist_m;
_state_pending.signal_quality_pct = RangeFinder::SIGNAL_QUALITY_UNKNOWN;
_state_pending.voltage_mv = 0;
update_status(_state_pending);
return true;
}
OK . I Cloned and modified the Source by my self but I haven’t raise a PR to Main Git before . I have to learn the correct procedure first to prevent the false PR . If you have helpful link or document Please share it with me . thank you
Hi!
Thank you so much for the fix. It is indeed a bug. I just need to test your PR once on real hardware and then I’ll help get it merged. @nrgs_barani in the mean time you could use the new “structure” method in handle_script_msg(), in your lua script. That should still work. Its the “legacy” method that is broken as far as I can tell (which is what you are using in your script). The next beta release should fix it all. Thanks for the report!