Hello, ArduPilot developers!
Have you ever envisioned a drone capable of flying stably in GPS-denied environments like underground parking lots or dimly lit tunnels? Introducing the SU17 drone—a cutting-edge, open-source platform that combines advanced quad-camera visual positioning with a highly integrated hardware design!


Currently, the SU17 runs on the PX4 system. However, we aspire to bring it into the ArduPilot ecosystem to offer greater flexibility and potential for developers. To achieve this, we invite developers from the community to collaborate with us in making this vision a reality.
We are open to various forms of collaboration, including but not limited to:
- Individual or Team Development:
Developers or teams can take on the adaptation work. - Joint Development:
Our engineers can collaborate with developers to tackle technical challenges together. - Other Innovative Collaboration Models:
We welcome any ideas that contribute to adapting the SU17 to ArduPilot.
Hardware Support for the SU17:
It’s important to note that the SU17’s flight controller hardware fully supports ArduPilot. Here are some key hardware specifications for reference:
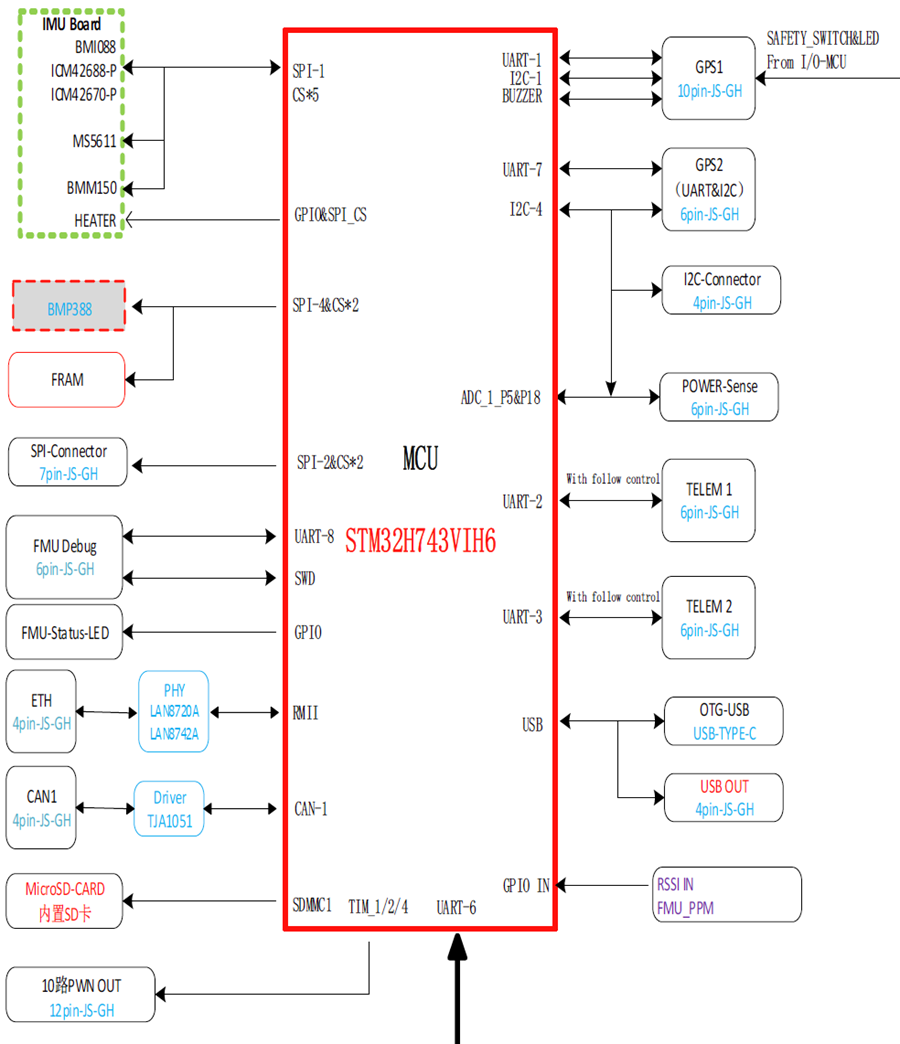
Core Features of the SU17:
-
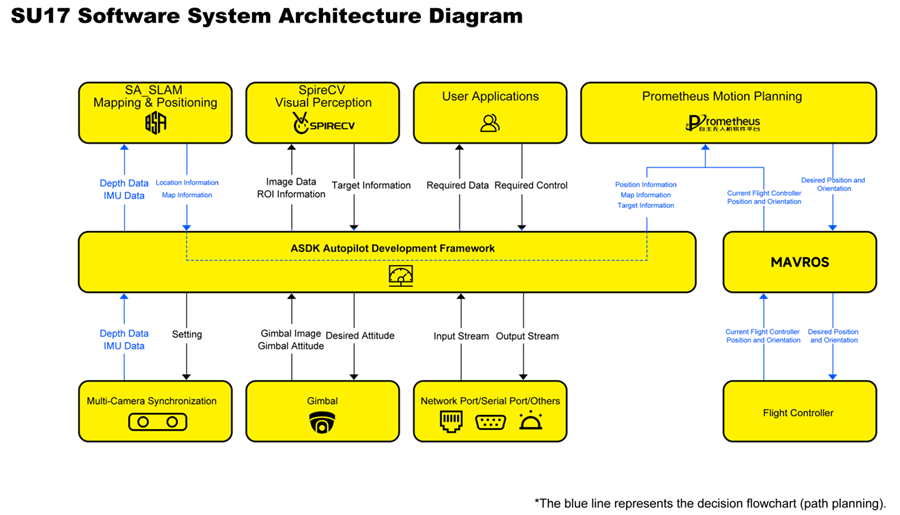
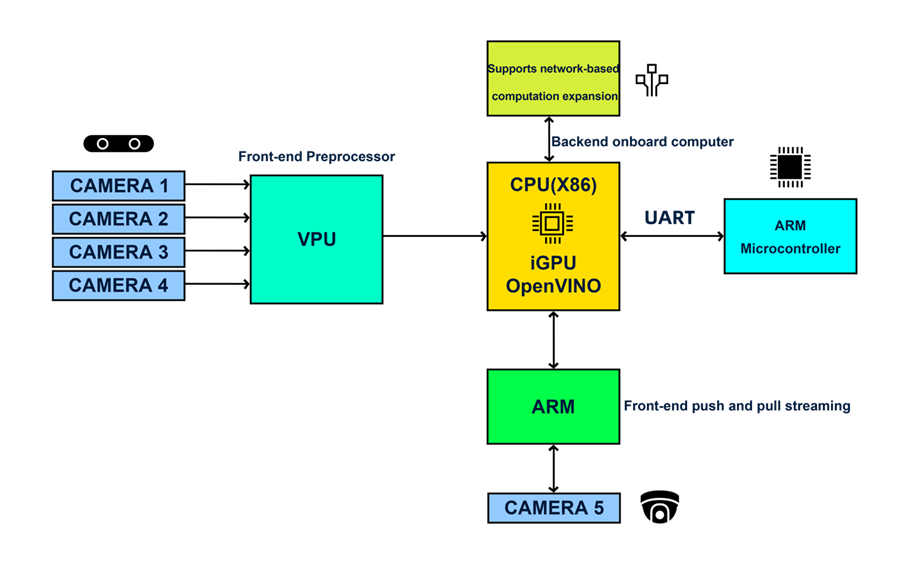
Quad-Camera Visual Positioning:
Equipped with front and rear stereo cameras, the SU17 can fly stably in GPS-denied environments such as underground parking lots and tunnels. -
Support for 3D LiDAR:
The SU17 can integrate with 3D LiDAR for efficient SLAM mapping and path planning, making it ideal for GPS-denied environments with low light conditions. -
Fully Open Software and Hardware Interfaces:
We provide software and hardware schematics, along with interface documentation, to ensure developers can easily access and customize features.
-
High Integration Design:
Compared to many open-source drones, the SU17 offers a higher level of hardware and software integration, delivering industry-standard stability.
Ideas and Questions:
We’d love to hear your thoughts: Are there any drones like the SU17 in the current ArduPilot ecosystem? If so, please share your experiences and insights. If not, we hope the SU17 can fill this gap!
Let’s work together to bring the SU17 into the ArduPilot ecosystem! Whether you have technical suggestions or collaboration ideas, we’re excited to hear from you!

