First of all, forgive me for my english, i learned it a lot of years ago and its a little rusty.
Ill try to explain:
Im new to copters, just finish my first build, a DJI F550, but im no having so much luck at the moment, because a i have crashed the two times that i have flown.
It was the same the two times, just a test flight, 1-2 meters of alt and trying to maintaining the position, and suddenly the copter stops responding to me and gains like 3 or 4 meters of altitude. In that moment i tried to change the flight mode, but had not response, and finally, cut off the throttle. The copter continued in that position like two second, had a little position change, but i think that´s because the wind, and finally it fall to the ground.
Prior to that, i was flying like 5 or 6 minutes flawlesly.
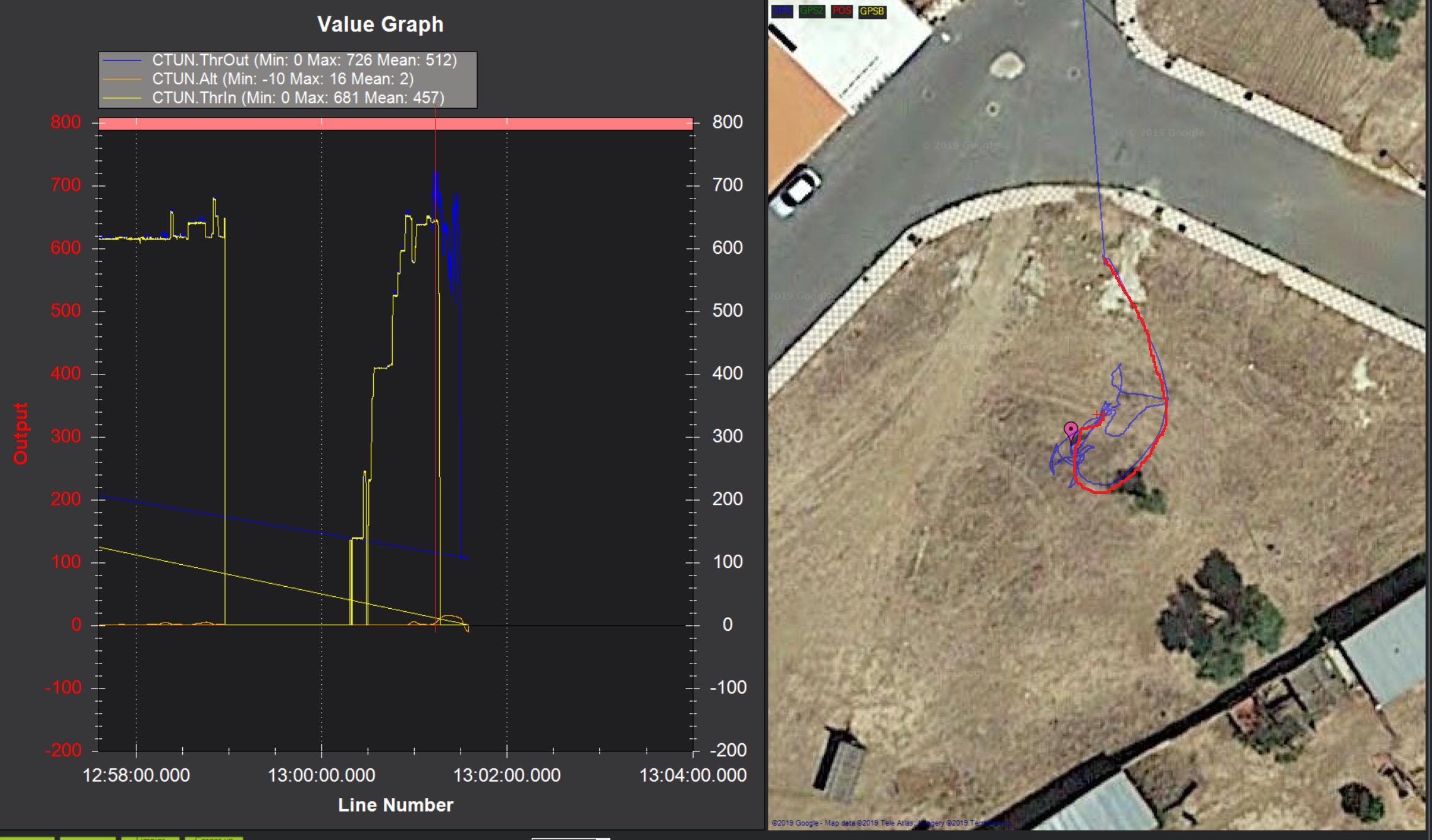
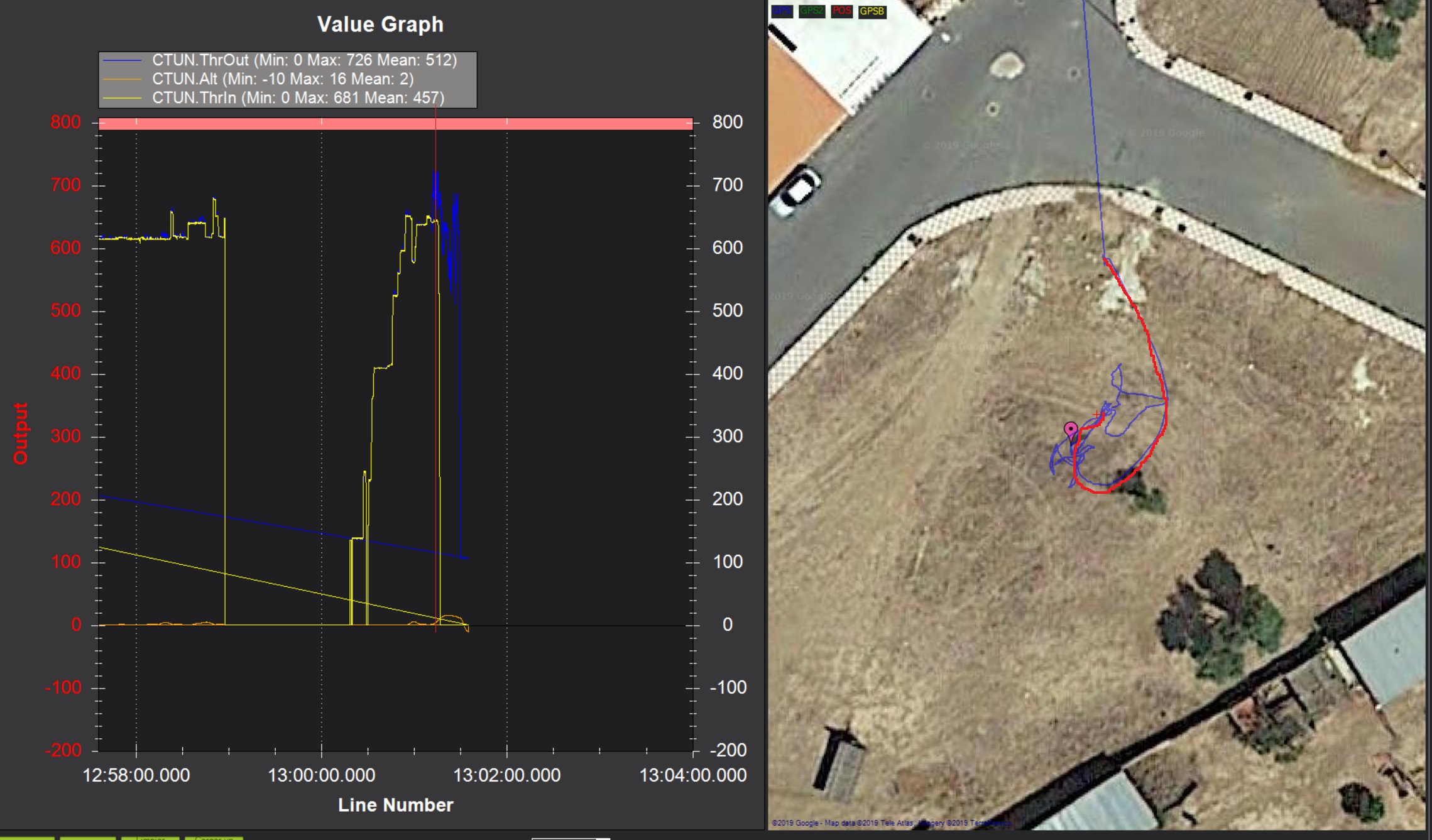
There is a log capture of the moment of crash, any ideas would be so appreciated, because right now, i just dont know what to do. The red line is when it started to fail.
The crash was caused by a combination of bad tune, your desired and actual are all over the place, and diminishing battery voltage.
Although the copter could keep it together when the battery had capacity, once the battery got low it lost the authority to override the bad tuning.
Your log is very basic as it is not logging RCout and IMU data.
I am guessing your RCout values are up around 1700PWM.
Is that correct?
What sort of vibrations are you getting?
This is where the IMU logging would help.
First of all, thank you so much for taking the time to see the log and write me that answer, i really apreciate it.
I havent Autotune it yet. Was expecting to make it today, but i wasnt felt confident enought to switch to Alt Hold and run it. Now i see that it was a total mistake.
My RCout goes from around 1100 to 1880.
Dont felt any special vibration, like i said before, everything seemed to be ok until the crash. The only neg thing was that the copter suffered to mantain the altittude, but i though that was because of the front wind.
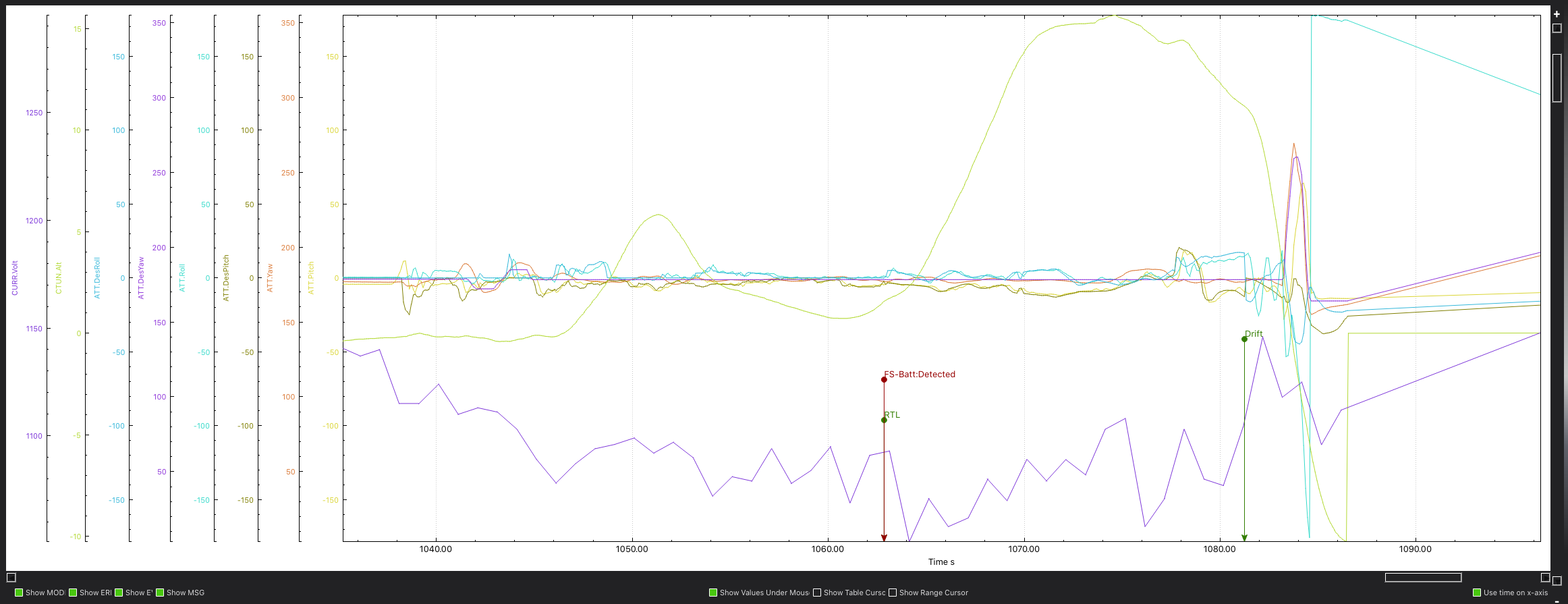
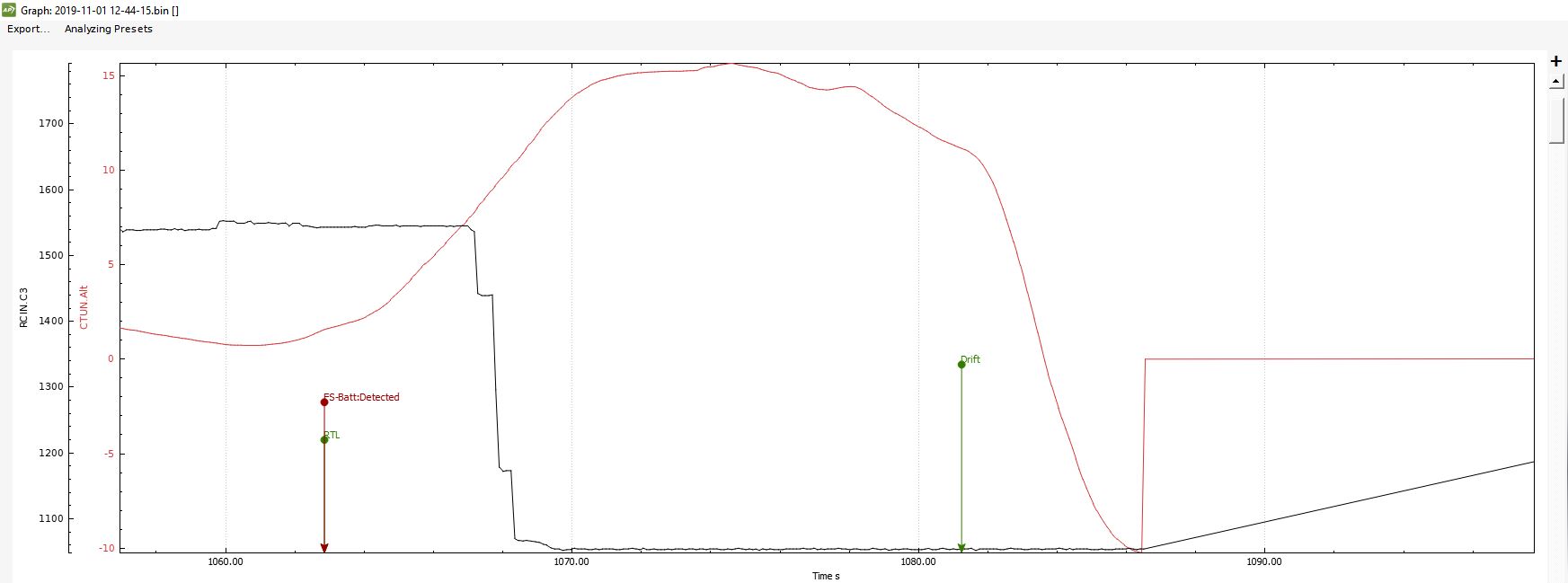
So, what i have undestood by know, is that the copter entered on failsafe because the low battery, and switched to RTL. Here i got nervous, and ignoring that the copter was in rtl, pulled off the thorttle and swiched the mode, making the drone to crash. Is that correct?
But i have two doubts. The first, when the copter crashed the battery had 11.6v (EDIT:just saw on the log that was 10,5v when the FS activated, the 11.6v was with the copter on ground), and the failsafe is set on 11.0v. The second, when the RTL was activated, the copter went to the oposite direction to where it take off.
RTL was triggered from battery failsafe. It climbed to RTL_ALT. You dropped the throttle and then switched to Drift Mode while the throttle was still at zero. This is no different than what will happen in Stabilize Mode when the throttle is dropped. Rapid Return to Earth. Add to that a Sat positional estimate with Hdop from poor (1.5) to bad (2.5). I don’t see any mystery here.
You would be wise to activate full logging especially imu. Then have another flight. Check your logs after the flight especially imu and vibes. It would be unwise to try autotune until they all look good.
Balanced your motors and props?
{kind=link}