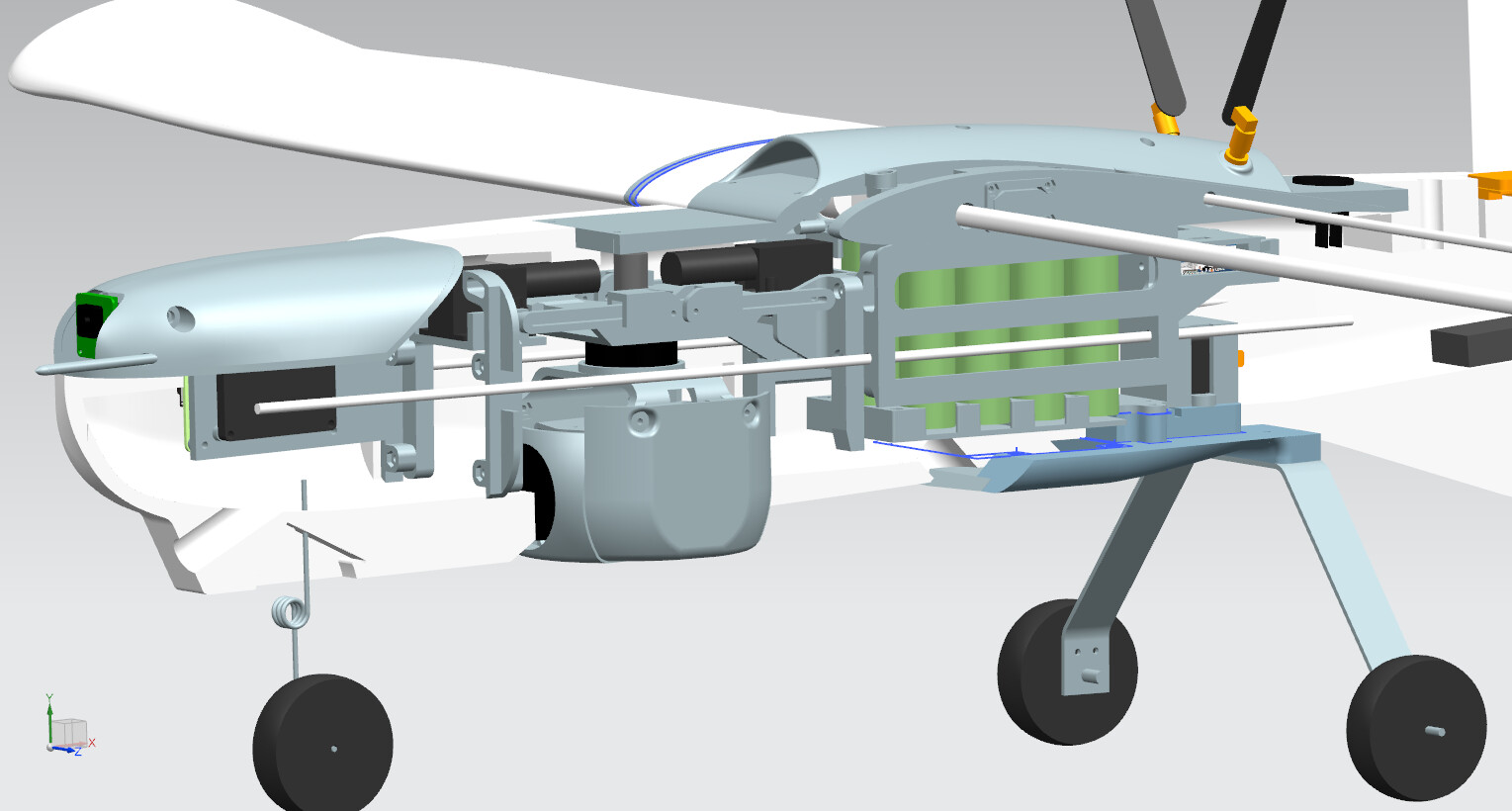
Hey, we at searchwing.org are a group of volunteers building fixed wing drones for maritime search and rescue. Mainly we are currently working with civil Search-and-Rescue (SAR) organisations operating ships in the meditarrenean to help people in distress, as there is still a lot of people dying while trying to cross the sea.
In this context we created a open source tool for optimized and fast automated mission planning for our ardupilot based fixed wing drones. The mission planning is optimized for SAR operation usecases on the open sea where range optimization and taking the weather / wind into account is important, but can be also used for other usecases.
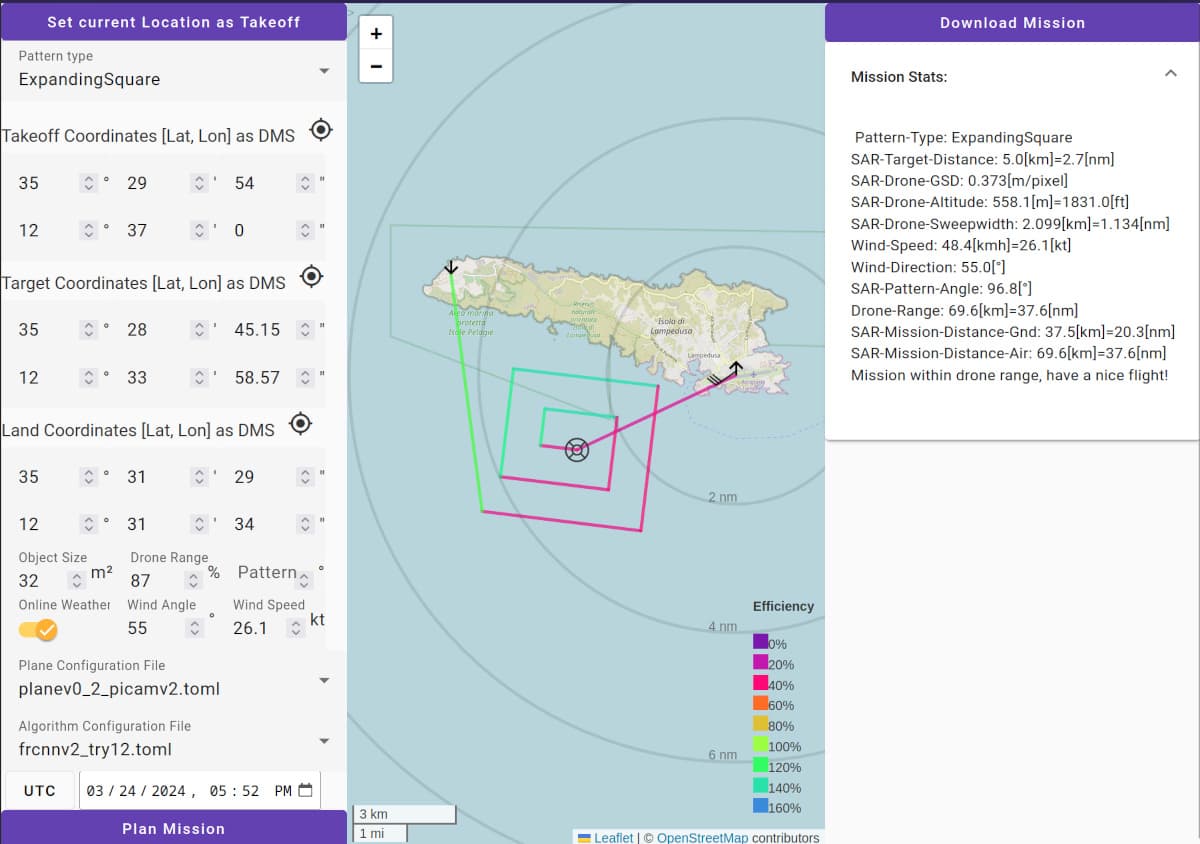
The automated planning is based on a set of user inputs:
- Drone parameters (range, camera-pose)
- SAR-Case image detector algorithm parameters (minimum detectable objectsize)
- Takeoff coodinate
- Estimated SAR-Case coordinate
- Land coordinate
- SAR-Case objectsize to calculate maximum altitude for given minimum detectable objectsize
- Wind strength and angle from online-weather API for fixed wing flight efficiency estimation (like plane-wind-fs.lua)
- Time in which the pattern is flown to minimize sun reflections (for fixed cameras)
Possible pattern types (according to Doc.9731-EN IAMSAR Manual):
- Expanding square search (SS)
- Survey / Parallel track search (PS)
Output will be as a *.plan format to be imported into QGC, but we plan to support ardupilot *.txt missions soon aswell.
If you are interested in trying it out or you want to contribute, please checkout the codebase at