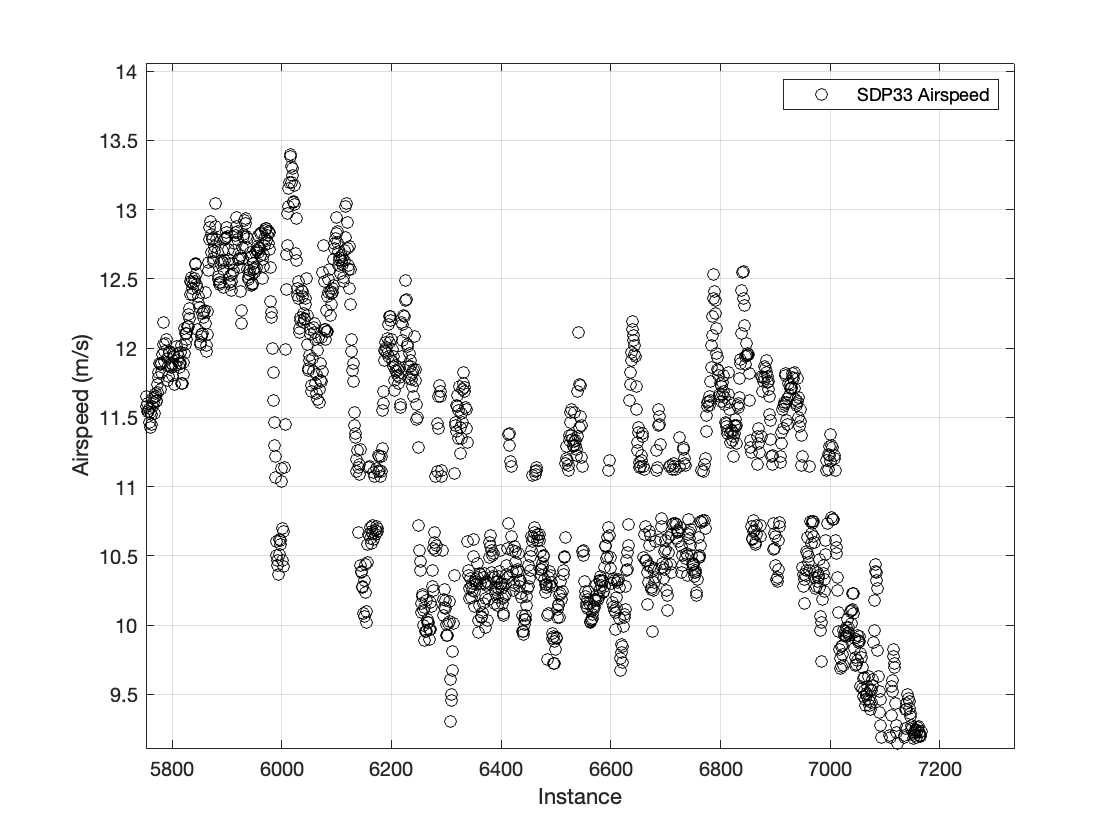
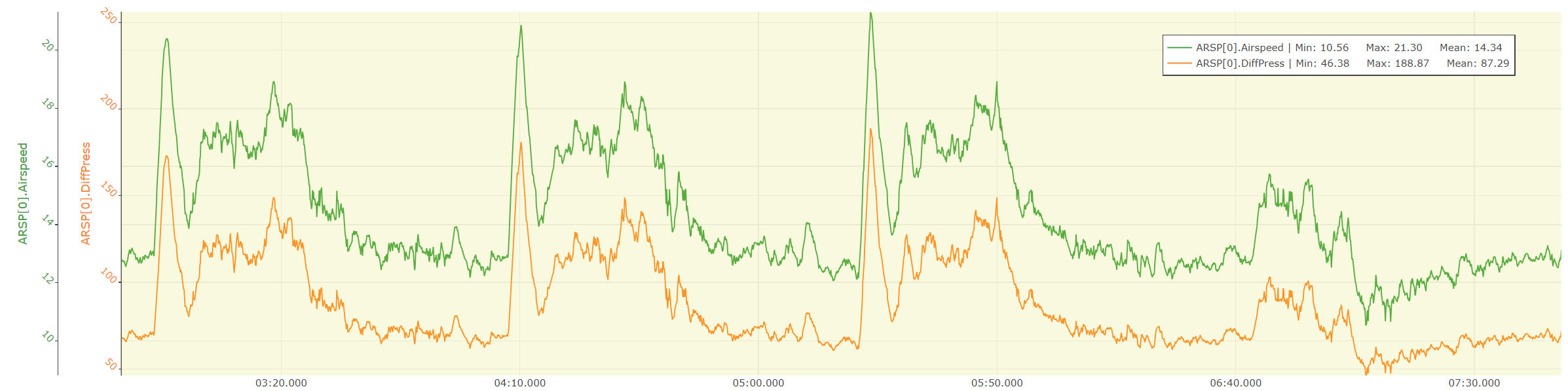
I have been working with the SDP33 airspeed sensor for some time and always noticed dropouts/ gaps in a certain airspeed range. I have looked through the differential pressure values and the dropouts are still there. So I think it may happen when the sensor is read. I’ve attached a log that shows the issue in airspeed and differential pressure. It is most visible in the figure between 10.7-11 m/s as I am using a 7” long pitot static tube (I am working on getting the SDP33 working with a 7” pitot static tube). This value would be different if using the SDP33 with the provided 3” pitot static tube. If anyone has come across the same problem or has any insights, it would be greatly appreciated!
This flight was done with Plane 4.3.3 but I see the issue with running the latest 4.4 as well.
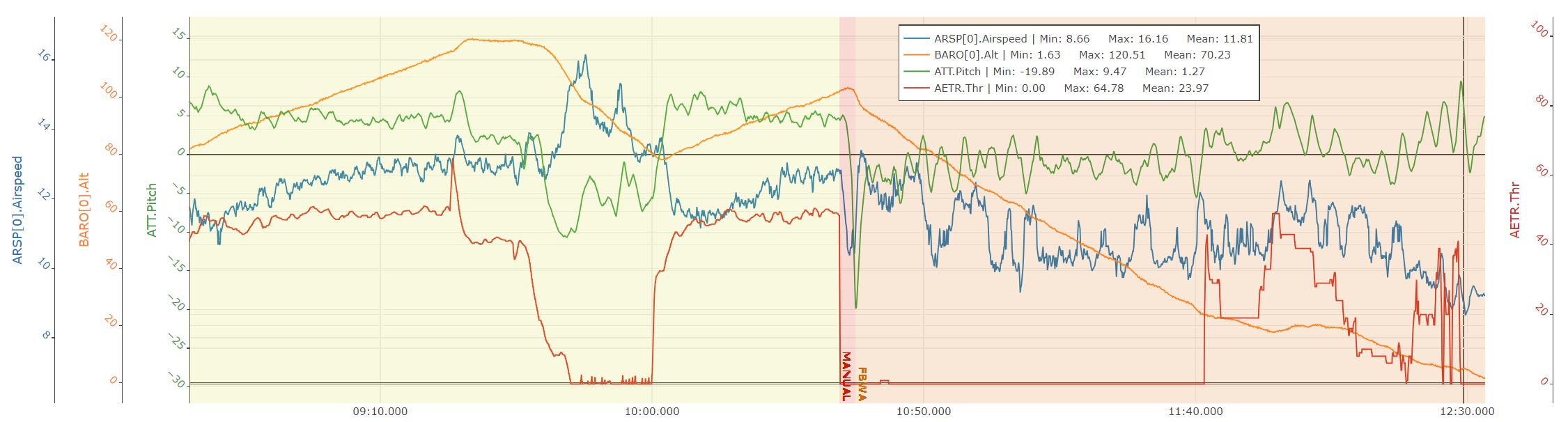
It’s closer to the end of the flight when landing in the log I’ve attached but I’ve seen it in other logs as well. It is the second time it has entered FBWA mode.
I see, the fluctuation in the airspeed is certainly larger in FBWA mode than in Auto mode.
But considering that the pitch fluctuation is larger in FBWA than in Auto and that the throttle fluctuation is also larger just before landing, I think it is reasonable that the airspeed fluctuates relatively larger than in Auto mode.
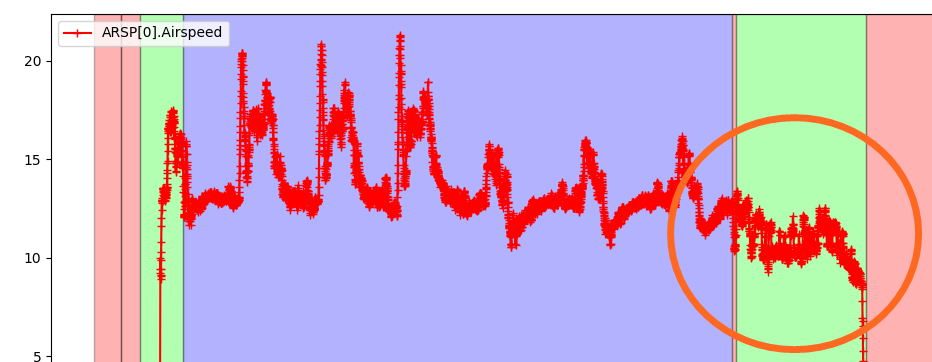
Which programme do you use to plot the data? In Missionplanner you cannot recognise drop-outs in a narrow data range. With Mapexplorer, on the other hand, it is noticeable if you know what to look for:
The original graph attached is plotted using Matlab, although I’ve also used Mavexplorer for plotting. From what I’ve seen in my logs, this issue still occurs when my plane is in a loiter, not just during landing. I don’t think the pitch fluctuations are the cause of this as I don’t have any values within the dropout range over the entire flight. The portion of the flight that you have highlighted includes the dropouts of concern. I am curious what causes these dropouts, possibly the driver for SPD33 loses some values and how this will affect the plane’s EKF and autopilot. I’ll be testing the sensor more and any suggestions would be great!