Does anyone have experience with scheduled autonomous flights in ardupilot ?
What actually I want is that :
Once I plan and upload a particular mission file in Multicopter.
The copter should take off after every pre set time (for example every 1 hour).
Complete the mission.
Return to Home
and Take off after 1 hour again
If there is no such feature kindly guide me some basic steps to complete this application
Like Maybe I can use drone kit / MAVSDK or something like that
Lua scripting looks like the best fit for this simple application. You can get the absolute time from the GPS, and you do not need an extra companion computer
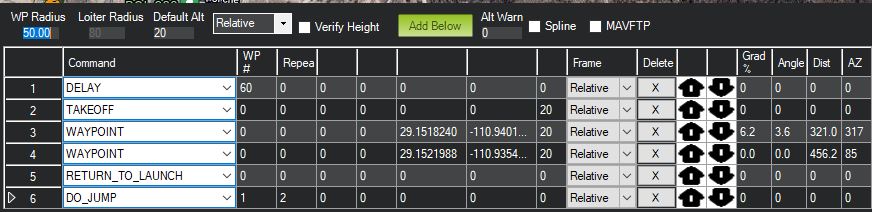
You can do this with available commands. Delay with a 1hr time, Takeoff, waypoints, RTL, then a DO_JUMP to the Delay command.
This Mission Delays start for 60 sec runs the mission and repeats twice.
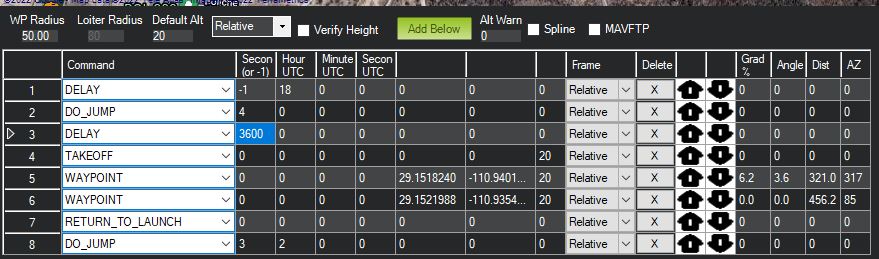
You could start the Mission with a UTC time instead of an elapsed time if you want. That would require 2 Delay’s and 2 DO_JUMP commands to start the Mission on the clock and then run it every x minutes/hrs.
Like this:
Runs good for me. Did you set the AUTO_OPTIONS and the DISARM_DELAY?
I have flown a lot of missions like this, there are some pesky parameters to setup
There seems to be an issue with my 2nd mission with the DO_JUMPS but I’ll figure it out
I was thinking something external, like a arduino or similar to power everything up on a schedule (or via some external signal). Maybe it could just interrupt the flight controller Vcc instead of dealing with issues related to connecting and disconnecting the main battery supply.
And set up a landing pad that charges through contacts on the landing gear.
The charging pad must be set to charge the flight battery (enough) even while it is connected and in use. A standard charger wont do this unless it has a power supply mode where you can manually set the voltage.
Thanks for the advice. But in my case this mission schedule has to be followed on daily basis. not for single use only…
In short , A fully automated flight with minimum (or almost zero) pilot input. Like a automated security guard that takeoff and visit waypoints in mission defined
I think Dave’s approach could be made to work, but it may not be the most practical over the long term if this is an ongoing task. Have you looked at LUA scripting? It seems to be the answer to a number of the “out of the box” tasks that get discussed here. Depending on the flight controller you’re using it may not require the addition of any hardware.