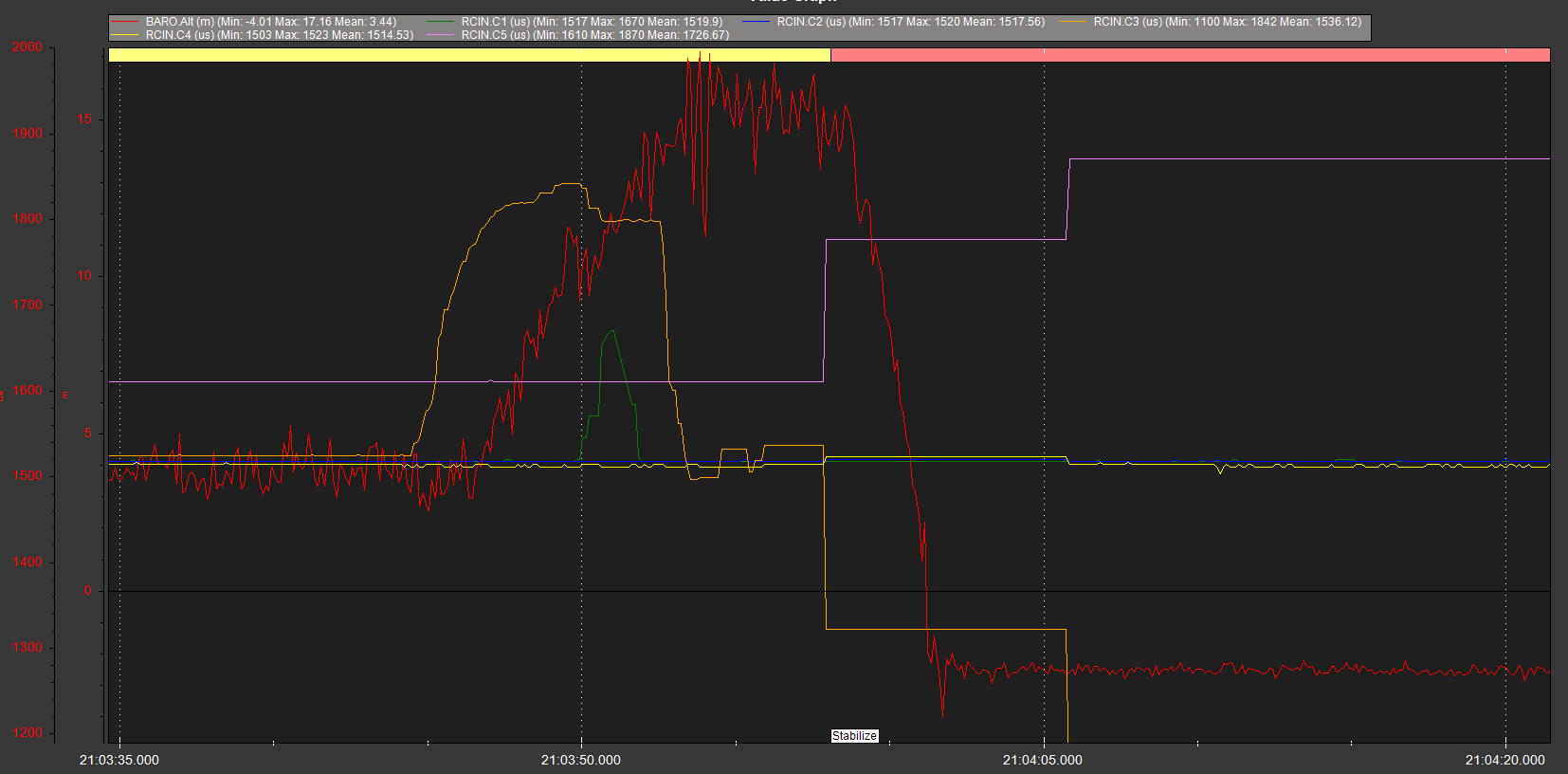
I am facing a critical problem about the SBUS RC channels which caused the crash of our copter. All the channels of SBUS suddenly changed; and channel 5 (flight mode) also changed which switched the copter from Loiter to Stabilize, it crashed because the throttle (channel 3) was low in the glitch.
I attached the photo of this situation and the log file
I am using Cube Orange, Futaba T14SG, Dragonlink 900Mhz
The Holybro Pixhawk4 had a RC input problem that has never existed with the Cube. Can you check or set your Futaba/Dragonlink failsafe actions to no pulses or something like that?? I’m not familiar with the Dragonlink.
It may be that you need to set all sticks and channels how you want them in failsafe condition: example, flight mode to RTL or Loiter and throttle to mid position.
From a Ardupilot/Cube perspective it did what it was asked to do by the receiver. It looks like the pilot hit the mode switch.
My preferrence is for a spring-centered throttle and PILOT_THR_BHV,7 for multirotors. Especially if you are going to let go of the sticks, like using a ground station - then you are always at hover throttle if something goes wrong.
Yes, this should be posted in Hardware>Radios. Flight Mode change to Stabilize from a change in Chan5 input with the throttle low produces the expected Rapid Return To Earth.
Thanks for your reply. Yes I will consider using the spring-centered throttle and check the failsafe in the dragonlink setup.
When this happened, the pilot is experience enough to switch back to Stabilize or Althold to take back the controllability. In this case, he did changed to Stabilize when he saw the copter losing its altitude. Therefore, the mode switch we are looking at here is reasonable because anything greater than 1750 is considered as Stabilize mode (in my set up of flight mode 6). One more thing, even the pilot changed flight mode to stabilize, there is no reasons for others channel being “flat” and constant like the log showing.
I will keep you posted about the checking of the dragonlink receiver failsafe.