I would not use either of those functions for a multirotor. Center the trims on the Transmitter and don’t touch them. Then do a proper accelerometer calibration. That’s it.
i change AHRS_TRIM_X (Roll) and AHRS_TRIM_Y (Pich) for trimed tricopter, with these parameters the drone flies level without drift, but the HUD is not level anymore.
currently the values are;
AHRS_TRIM_X = 0,09162576
AHRS_TRIM_Y = -0,3315797
when i use “calibrate level” to level the HUD on Mission Planner, the AHRS values is change and the drone back flies with drift before
I have had this happen in a Pixracer after an update of firmware.
Tried multiple times to calibrate Accel’s but it still was rolling right nearly to full stick.
In the end I refreshed the firmware and all was well.
Might be something to try.
Have you done the Accel Calibrations?
Both of them?
How balanced is the copter?
thks…
i will take a check and update of firmaware actualy i have arducopter 3.5.5 this is a last version apears on Mission Planner.
about accel calibration…
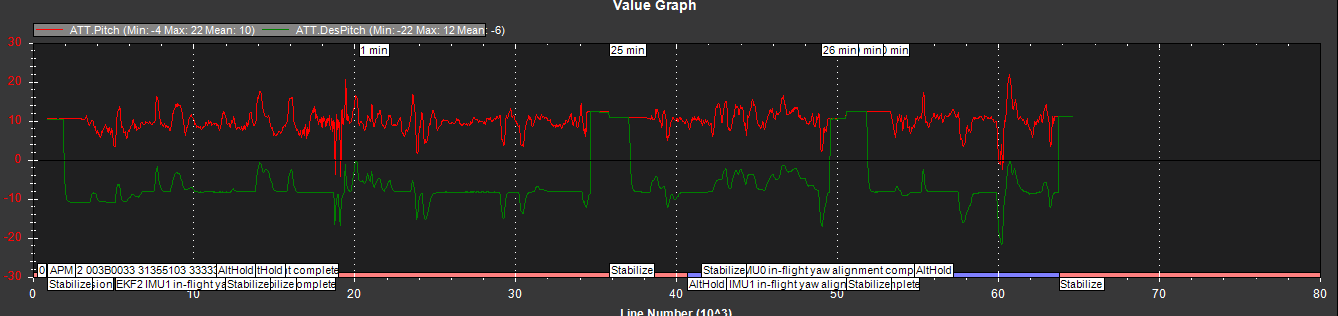
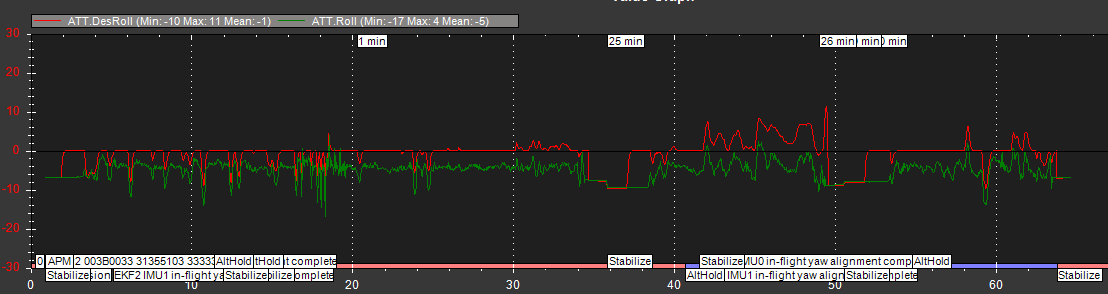
After done all the calibrations, moving on all axes,and trims corrections, the tricopter continues flying with drifts, in some cases the result became worst
the battery this installs in the center of the frame all the time, I have never had problems with the trims before, but I have been tried various ways to solve the problem, even bought and changed the pixhawk, but still the problem persists.
i change AHRS_TRIM_X (Roll) and AHRS_TRIM_Y (Pich) for trimed tricopter, after this the drone flies level without drift, but the HUD is not level anymore.