Hello, I managed to talk my way into setting up a heli, and rather than starting with something small I’m diving into the deep end of the pool. The heli is a Vario, 4-bladed rotor system, 4-servo swashplate, 1.8m blades. I’m using a Cube Orange+ and AC 4.4.0. It has the gas engine, but I’m a long way from getting that setup.
The heli has been flown already so I know it’s mechanically good.
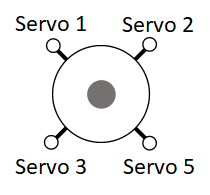
1 - Swashplate type: I had set the swashplate to H4-45. In my case the four servos are mounted in an + pattern, not X like in the image.
Using this image from the wiki, I ended up rotating the diagram servos 45 degrees counter clockwise, so Servo 1 in front, servo 2 on the right side, etc. This seems to give me the pitch and roll inputs as I need them (advancing blade goes to min pitch, retreating blade goes to max pitch). Is this the correct way to set up this kind of swashplate?
2 - Do I need to use servo Linearize on a 4-servo swashplate? I’ve been trying with it on and off and really I can’t tell a difference. It not hearing any servo binding, or at least not significant enough that I’m worried.
3 - I’ve done the initial setup of the Collective pitch settings. It all seemed to work using manual servo mode Min and Max . The thing I notice is that when I input full pitch and roll the blades seem to hit their travel limits long before the physical stick does. I’m in stabilized mode with the manual servo mode set to Passthrough.
You’re not kidding. This is definitely not something to learn on.
If your heli has a 4 servo swashplate that is a “+” configuration, then you should use the H4-90 swashplate selection not the H4-45 (not sure why you did this).
Yes, typically you want to use the Linearize servo option when using a 4 servo swashplate. Be sure to follow the instructions to set this up. it is different from the regular setup. You can’t just turn on linearize servo and expect that it works. There is a mechanical setup process that is required for it to work correctly.
It’s sort of the missing link for me. I’ve been working with Ardupilot and drones such as the SDO50 for a few years now, but before that I used to fix (and teach) full sized helicopters. I have an accomplished RC heli pilot who’ll be on the sticks when the time comes to test it. But generally, as my ex would say, I make poor life choices.
I tried the H4-90, but because of the four-bladed rotor system, the swashplate movements weren’t correct. They would have been right for a 2 bladed system. On the 4-bladed rotor system the pitch horns only lead the blades by 45 degrees so the swashplate inputs also need to offset by 45. H4-45 was the only way to get the swashplate to move correctly. Let me know if I’m missing something.
Since this heli flew already without an FLB, (only yaw gyro), the linkages were already setup. As per the wiki I had to make some minor trim adjustments to offset the servo installation but all seems well so far. Does Linearize come into effect after a reboot of the FC? I won’t see the machine again until next week so I’ll make sure everything is good before I continue.
So, what does the manual say for the set up of this rotor head? I was looking at some of the rotor head the Vario has on their website and the pitch horn ball seems to be more than 45 deg ahead of the blade but that is me just looking at a photo of their rotor heads.
So I agree that these are not like the two bladed teetering configuration which has roughly a 90 deg phase lag between max blade pitch input to max flapping response. Even the two bladed systems are pretty stiff and the phase lag is probably closer to 80 deg. The way you were trying to set this up by using the H4-45 was to achieve the 90 deg offset from max pitch input to desired max flapping? I’m pretty sure that is not the case with this head. It is probably pretty stiff. Not sure that he phase lag is 45 deg but it isn’t 90 deg.
I would suggest that you refer to the manual to see what the proper swashplate type is for this head. @Ferrosan Do you have experience setting up this head? Any insight would be appreciated.
what kind of trim adjustments? The trim adjustment for not using linearized servo is different from the one where linearized servo is used. If you don’t use linearized servo then you would use the SERVO_TRIM parameter to level the swashplate. if you do use linearized servo then you would level the swashplate with the mechanical linkages. With linearized servo set up, the SERVO_TRIM is only used to make the servo arm perpendicular to the main rotor shaft before leveling the swashplate mechanically.
No, a reboot is not required for linearized servo to start working after the parameter is set
My experience is that the advancing blade should be at the minimum pitch angle for directional flight (and retreating blade at max). To me then this setup made sense because when I align the rotor head with the airframe and pushed the pitch stick forward, the blade perpendicular to the airframe traveling forward went down, and the opposite blade when up. The two blades parallel with the airframe did not change pitch. But I’ve learned dealing with drones that not everything scales, so that’s why I’m asking. I won’t have access to the instructions for this heli again until next week so I’ll look and see what they say regarding the setup.
Okay, that helps a ton. I know the wiki mentions that, but this way of stating it clears up my confusion. Thanks!
I found this post where Chris describes a setup procedure for an H4-45. I know this is on an older version, but would his approach still be valid on the current firmware?
Thanks for all your help! I know as this project goes on I’ll be asking more questions.
Yes this is true to a point. The fact is that the blades behave differently when they are not hinged for flapping. I am not familiar with how most RC helicopter manufacturers account for the blade phase lag. I’m hoping the manual says something or I’m sure @Ferrosan probably has some experience with this.
This is the usual way to determine the phase for all multi-blade rotor heads. I only fly scale helicopters and I have yet to find a manufacturer that provides separate instructions for their multi-blade heads. They all use the method you described for setting the phase. This has also worked wonderfully for me so far. You can move the phase mechanically, which sometimes leads to the fact that the rods from the swash plate to the blade handles do not run at 90 degrees. Many years ago, the manufacturers of remote control systems began to incorporate electronic phase shifting into their transmitters. With the advent of the FBL system, this function was moved to the FBL.
As far as I know ardupilot, only the generic 3 servo version has a parameter for the phase shift. It would be very nice if there was also a generic 4 servo solution with phase shift. If I am not up to date with the latest knowledge here, I am happy to be taught.
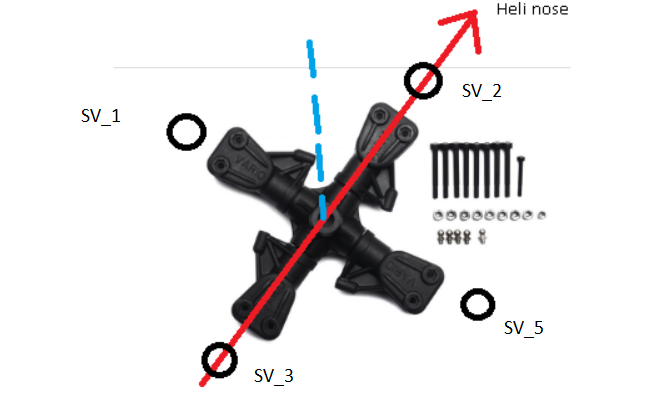
Hi @bnsgeyer@Allister If i remember correctly (I don’t have a Vario 4 blade right now, but I have had it in the past) your current situation should be as the following diagram, right ?(sorry for the poor drawing, not a Picasso lol)
So with the “+” mechanical servo position and using H4-45 swashplate type, for pitch control SV_1&SV_2 move together and in opposite direction to SV_3&SV_5, while for roll control SV_5&SV_2 move together and in opposite direction to SV_3&SV_1.
If this is your situation then you should be fine, just make sure to check the control/stabilization inputs move the right blades (as you have described).
Regarding the phase shift, you might have to adjust a bit with the swashplate driver as currently the software does not allow virtual shifting for the 4 point swashplate types.
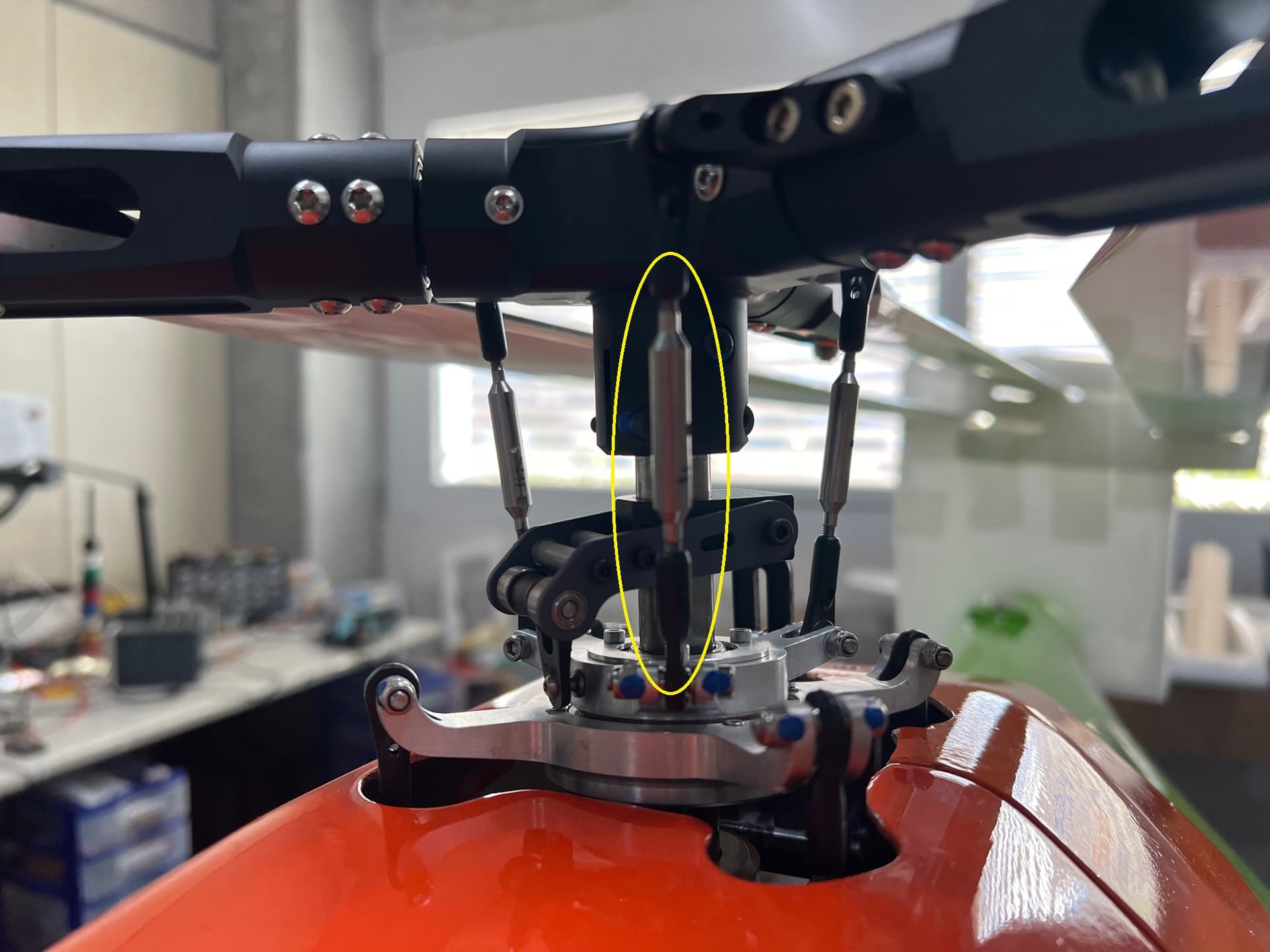
The very important thing when dealing with multi blade heads is to adjust the swashplate driver so the push rods are as close as possible to be perfectly in plane with the main mast (see the following picture):
If you rotated the diagram 45deg ccwise servo 1 should be on the left not on the front, maybe if you can provide a picture with servo numbers would help.
Thank you for the help. If I understand correctly, then I think I’m going in the right direction with this. I’ll make a quick video clip next week just to verify with you the control movements.