Are these continuous rotation or have a stop on 0/360 ?
edit: just read the entire spec sheet, and no stop…
Are these continuous rotation or have a stop on 0/360 ?
edit: just read the entire spec sheet, and no stop…
I seriously doubt it’s <5n (nano) Nm. Another unit with the same specs is a believable <5mNm which is 0.5Ncm
The seller has a typo. In fact, the Rotational Torque: <5mN·m I hold this sensor in my hands and very similar.
It seems to a layman like myself that digital would make it more accurate but you still have the amount of torque that needs to be applied to get it to move being about the same as the analog Bourne pot. The weight seems slightly less but not much. The Bourne pot is accurate repeatedly.
@iampete, @rmackay9. What do I set WNDVN_SPEED_TYPE to for the hotwire speed indicator? I’m bench testing now and it seems like it could be 1 or 2. Not much wind at the moment. One thing I’m noticing is it effects the wind direction reporting a lot. I’m figuring this is because there is very little wind and the boat is not moving. its GPS position is also drifting around a lot. Will finally sail tomorrow again
1 is to use a airspeed sensor with the airspeed library, 2 if for the modern devices rev p.
Yeah when the speed sensor is enabled it does proper true wind calculation so jumping about on the gps causes apparent wind
As always, Thank you. It looked like having it set at 2 was giving information that made sense. Look forward to trying this out tomorrow finally.
@iampete, @rmackay9.
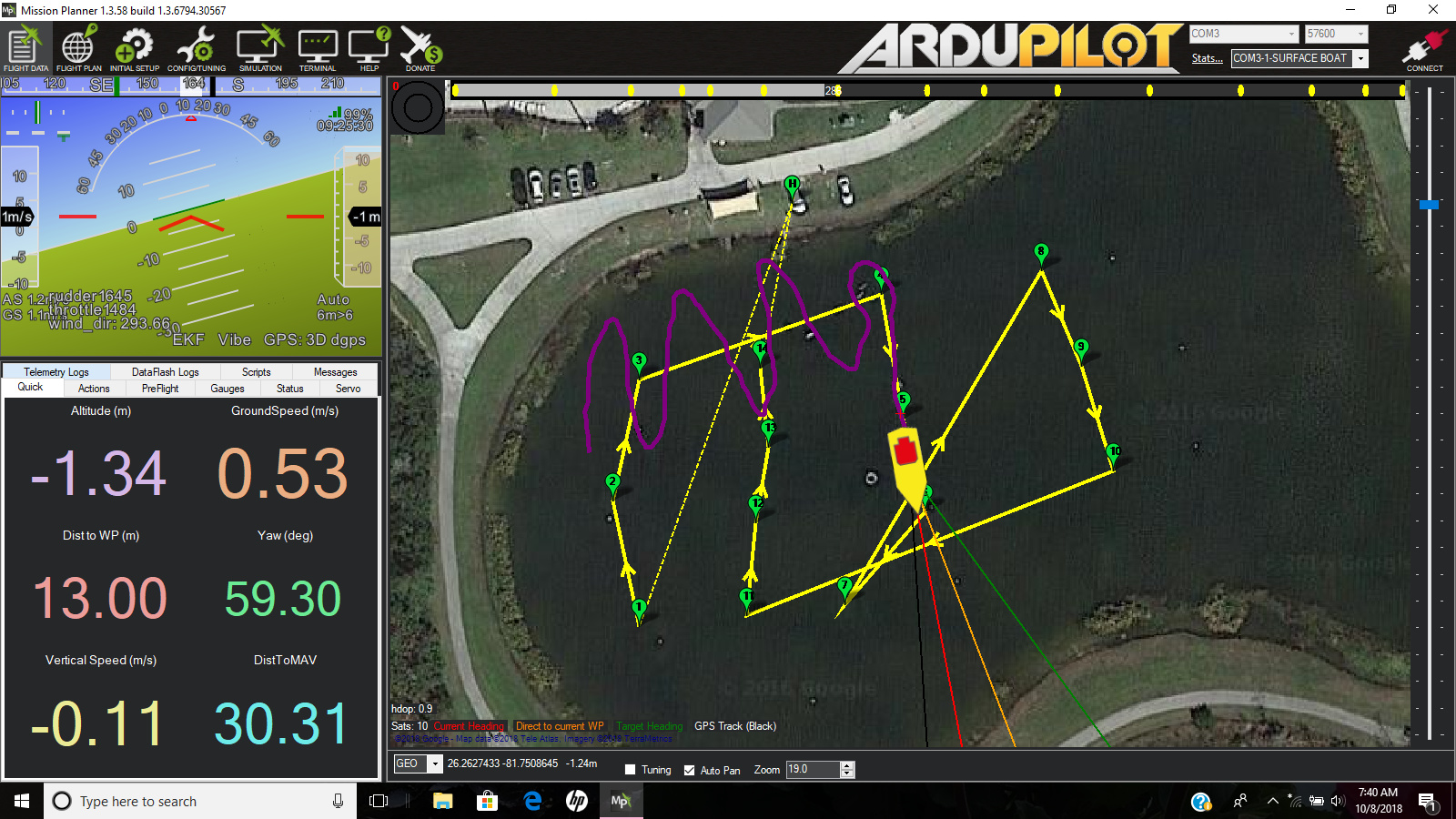
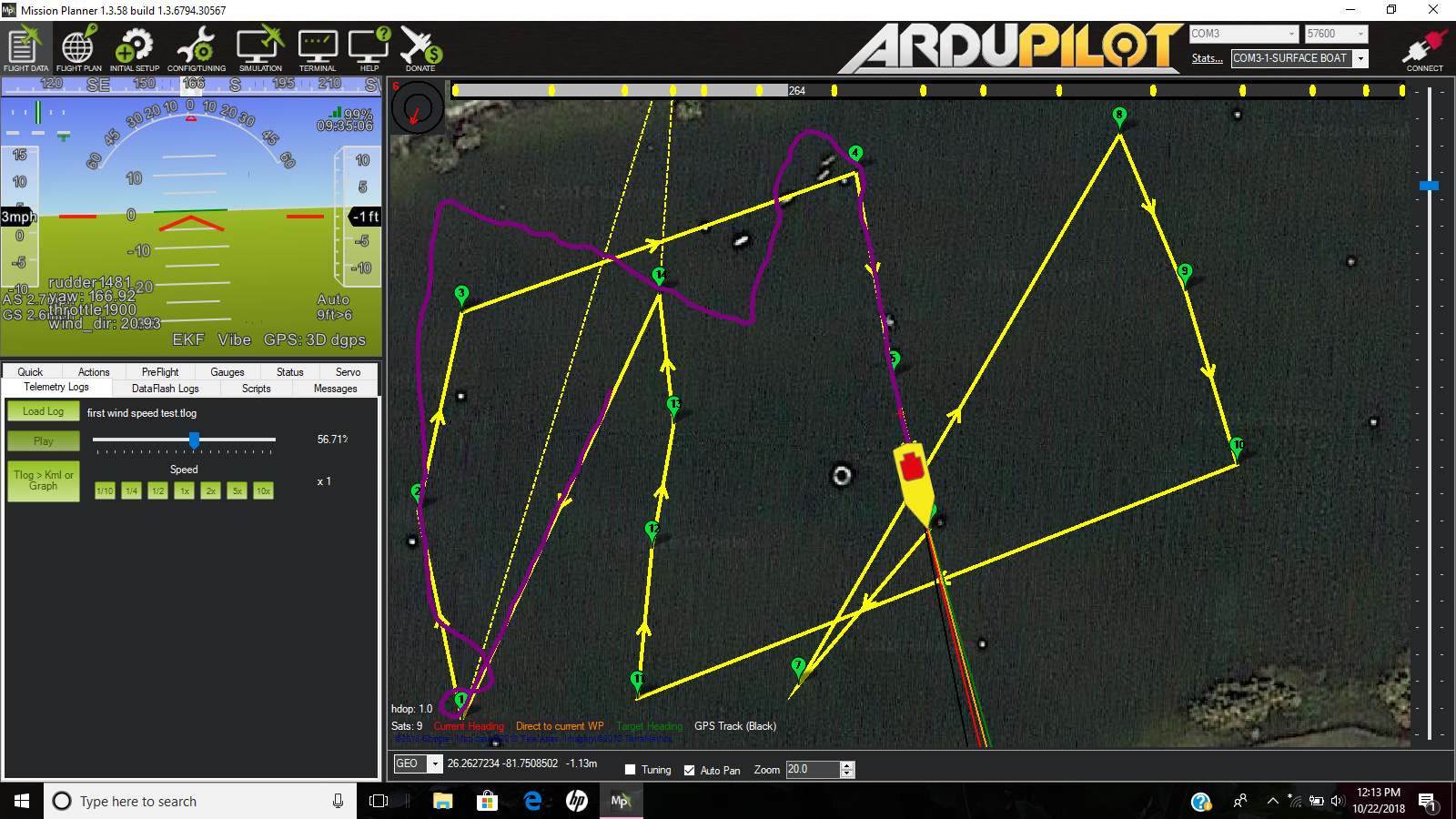
Today went very well with the airspeed sensor and latest code. I’m currently working on a foam board wind vane with a bit of balsa here and there to reduce the weight 6 feet above the waterline. It’s like this… The windvane mount, pot and airspeed sensor is about 1 oz. The actual vane part is 2 oz because its wood and requires a large counter weight. I think with foam and balsa I can cut this down to .5 to .75 oz. All this weight is making the boat heel more than normal under average wind conditions and causes the boat to wiggle and not be as efficient going to wind. I think I’ll be in good shape if I can cut the all up weight of the wind vane in half and possibly shorten the mainsail a bit. Attached are two screenshots of the boats track. First one is before the windspeed sensor a few weeks ago and the second is with it today . This is all looking good and improving.
And for what it’s worth I’m running the wind speed sensor directly off a 3S LiPo. It was fully charged at 12.58 volts and the sensor didn’t go up in smoke.
Just an update. I’ve put about 20 KM’s on the boat, 6 at one time, and have experienced no problems. Attached is a little video of me trying to keep up with sister ships in race trim as opposed to my heavier boat carrying less sail for cruising. The video is in Acro Mode. I got my butt kicked but not because of the code.
Looks like its working well, would be interesting to see how it would do if the others had the same rig.
Still would loose most likely. I’m carrying a 20oz battery compared to their 4 oz. Plus my RFD900, couple BEC’s, Power distribution board for added stuff later, and it was very calm air. This boat although is 58 inches has a short waterline. Doesn’t handle extra weight well.
Nice sailing 
you mean 20 nm  ?
?
Just a small observation. Acro is a bypass mode so sailing with it kinda defeats the purpose of having the controller onboard, or am I wrong? Note: I haven’t yet put any ArduPilot on my Kyosho Fairwind, so only “lurking” here…
No. Acro adjusts the Sails via the controller and I steer the boat. It was good to sail with other people controlled boats to see if I needed to adjust the sail settings. The wind sucked however.
Sailboat support is in master now and I hope to push out Rover-3.5.0-rc1 later this week for beta testing.
@iampete has also created a set of wiki pages here and the windvane page is here!
I’m suffering quite a lot trying to get my TT Challenger 800 built. After many days it’s basically together but I’m finding the winch servo’s spool drum (which winds unwinds both the main sail and jib) doesn’t work very well. The grooves for the sheets are very shallow so it seems incredibly easy for the sheets to come out of the grooves and get tangled between the servo and the spool. The kit comes with a white plastic thing to cover the winch servo but it just doesn’t seem to help protect against tangling. I think I might replace the spool with some really long arms if I can find them. Sorry to whine…
Getting all the string setup is a pain, if there is room you could use some thin elastic to keep the sheet tensioned on the drum. It would be a ‘open loop’ setup outlined here. You need enough room to stretch the elastic out though. You will find they get tangled less often while sailing as there is some tension on the sheets but if they do get tangled your abit stuck!

A standard Servo with a manufactured long arm from CF might be the best choice if there is enough space inside for the arm movement. It also depends of the geometry of the cables, and how they travel from the sail to inside the hull, so might also require some “alterations” if you want to have enough angle range…
The kit comes with a white plastic thing to cover the winch servo… It perfectly prevents tangling only if the diameter of the drum is equal to its diameter.