Hi Peter, quick question - who did the laser cutting for your mini-40 cradle? I’m looking to make up a stand for the 10R.
I was not even aware there was a beta version of Mission Planner. Cant find where to download that…
Anyway, before flashing the latest Rover code, I did press and downloaded the files under MP Help section: Check for BETA updates.
According to Wiki it seems the Beta should have been installed while I did that:
https://ardupilot.org/planner/docs/mission-planner-overview.html#support
The “Check for BETA Updates” button will install the current development version of Mission Planner. This contains all the latest features and updates, but also might have bugs, since it does not have extensive community testing.
so maybe some other issue?
Yep that is the beta build.
This is what you should see, in the tuning graphs, quick tab and HUD
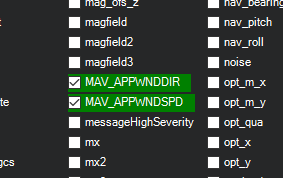
MP adds MAV_ and capitalizes it all just to make it harder to find
I did on the Uni Laser cutter, not much hope of being allowed back on that in the near future tho, still all shut due to covid.
I do have a K40 if you can make it from bits smaller than 300mmx200mm and don’t have too high expectations.
1 Like
Thanks Peter. I thought it might have been an online outfit that do small project jobs. It’s just the cradle arms that are awkward and I’d hoped to do them in one piece - I’ll make them up in sections to fit my print bed in that case but thanks for the offer.
Did you look at the LCJ Capteurs CV7 when evaluating the sonic anemometers? The OEM version is about the same price as the Calypso - so weighing up between the two.
That ones new to me, there is a NMEA 0183 version so it should just work with AP. Does look nice, about €500 vs €399.00 for the Calypso, unless I’m looking in wrong place.
I must point out that ArduPilot funded the sensor form me and Calypso gave me a discount.
The Calypso is not waterproof and is surprisingly heavy, not that I have compared the specs directly.
I suspect a nice mast head unit with cups and vane would be just as good. We support ‘cups’ but its hard to get the rpm to wind speed conversion factors from the manufactures. We support a single analog reading for direction, SIN and COS readings are also quite common and would be easy to add support for.
1 Like

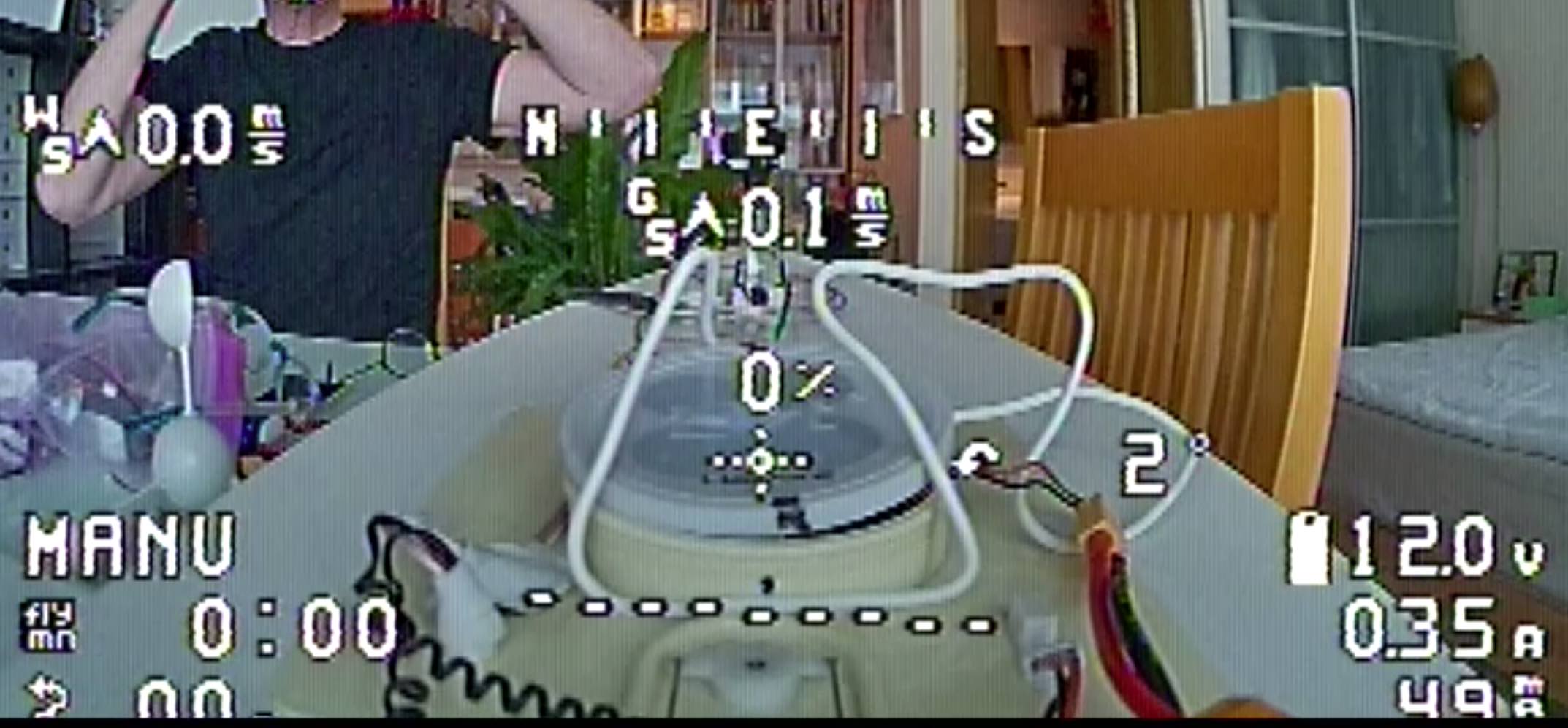
@karla Wind direction on the OSD is now in 4.1.dev. Just set OSD1_WIND_EN. You get a little arrow with 16 possible directions, not great but hopefully better than nothing.
Hey Pete!
Cool.
I loaded latest Rover Dev called 4.01 from 2020-OCT-13
I also updated the Mission planner with dev version yesterday.
Enabled the OSD1_Wind_en but still no movement on the OSD in the Goggles.
The HUD show all wind stuff is moving when I blow air on the sensor though.
What am I missing?

Aha, there is an even later version from today the 14th
I will try that…
Yep, that works!
Noticed that the Apparent wind arrow is pointing towards direction wind is going to, that’s good, just assumed it was pointing where wind is coming from.
Thanks Peter, definitely useful!
1 Like
I thought that was the most intuitive. There is the option to reverse the arrow for plane, I didn’t bother implementing it for Rover but I could so you could choose.
A new addition to the sailing family. It’s ready to test in manual mode and I just need to complete the wiring and mount for an anemometer for auto. The electronics box is modular so I hope to fine tune settings, iron out glitches etc. on land before transferring to a boat. I hope it will be useful for testing different rigs (wings etc.) and AP behaviour at higher apparent wind.

4 Likes
Nice!
orange parts are 3d printed? rest is aluminium?
looks relatively easy to convert it into an ice racer as well 
Yes, it is intuitive, shows where the wind is hitting the boat. Just assume most things are not intuitive so I got surprised, hehe.
No need implement a reverse function!
That’s right: 20mm square aluminium tube for the base with 80mm inline skate / luggage wheels. I think you could make ice skates from aluminium extrusion and mount them directly using the wheel bolts - that would let them pivot to keep in contact with the surface. I’ve used 8mm / 10mm carbon tube for the spars but you could use alloy or fibreglass. The sail is made from mylar drafting film, ripstop nylon and insignia tape. All the parts clamp onto the tube so there’s no drilling and you can move everything about as needed. It might benefit from a fairing of some sort to keep the string from snagging.
1 Like
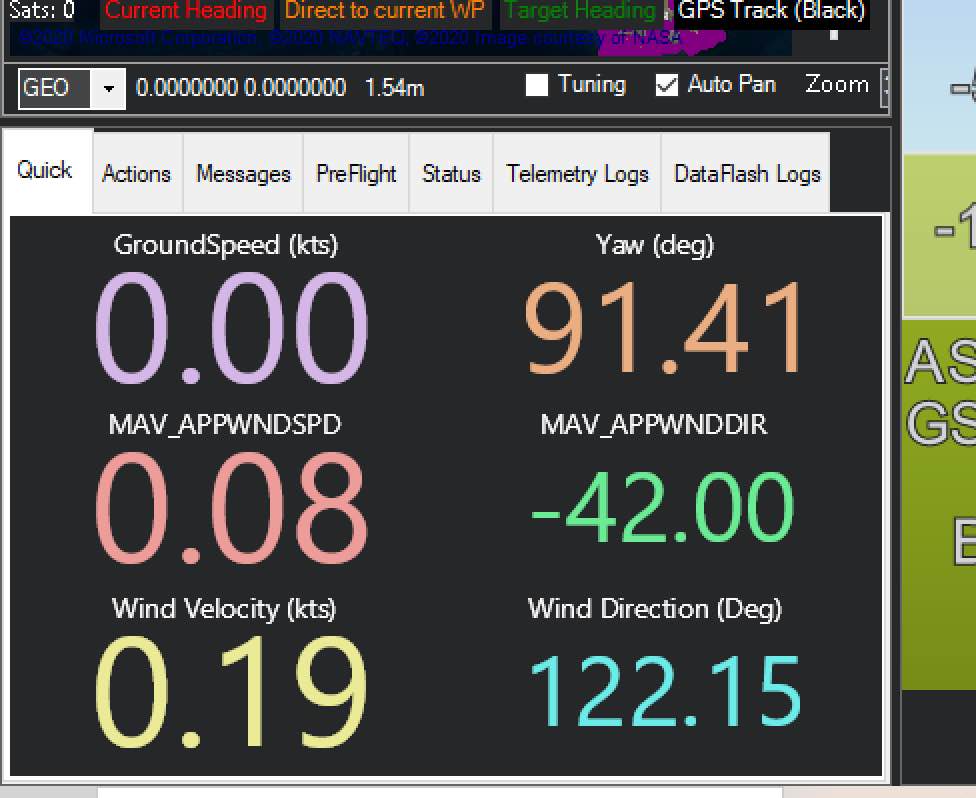
Hi Peter, you can add the CV7-OEM to the list of anemometers that work with AP. I’ve followed the NMEA 0183 Wind Vane doc and have set up the FCU with ArduRover v4.1.0-dev (37cf09a8) and the beta version of MP as per the thread above. I see both MAV_APPWNDDIR and MAV_APPWNDSPD in the MP data view. 
The wiring is a bit different to the doc - there’s no need for a logic level shifter, just a small opto-isolation circuit to decouple the NMEA lines from the UART input. Time to put the lid on and take it for a test!
2 Likes
Peter, is there any reason why the logger might stop after a mode switch? I was looking through todays results and there is no data after switching to acro mode from manual.
First run of the land yacht today. On the whole it worked well but the rig / conditions were too much for mast support so that’s getting a redesign and reprint.

Can you share the log? It should still be logging in manual.
I think you certainly claim the record for first ArduPilot land yacht!
I have remembered what this is likely to be, its very easy to accidentally disarm, minimum throttle for sail fully in and full rudder to turn. You can’t tell in manual because both steering and sail work when disarmed, if you had a throttle it would have stopped working. As ever there is a param for this, ARMING_RUDDER set to 1 so you can only arm with the sticks.
With this option set if you do end up fitting a motor is a good idea to setup e-stop and/or arm/disarm on a switch.
1 Like