Yeah, I have read those warnings as well, but I have been doing it for a while now and had no issues whatsoever.
so you just point your IDE to the source on the WSL system and make sure line endings are unix?
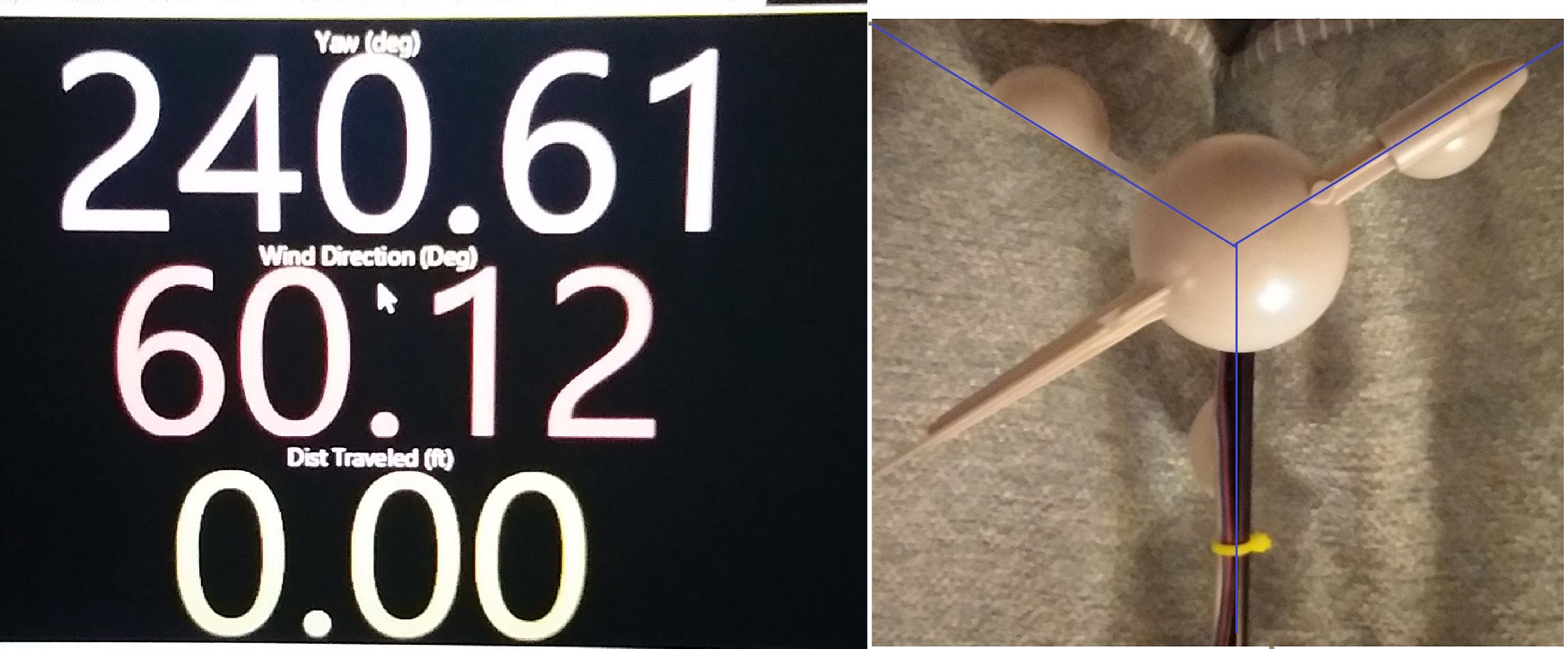
For anyone interested, I built the Pixhawk firmware with the apparent wind changes as iampete suggested.
1 Like
Pretty much yeah. I use notepad++. Didn’t need to configure anything for the line endings. I manage the files in Ubuntu. E.g. Creating and deleting new files. I have found that if you make/delete files from Windows it upsets git. That’s about it.
1 Like
Thank you @iampete and @IAMMATT I was able to setup build environment, download source, edit lines, build firmware and…viola! Now the apparent wind is displayed instead of the true/absolute wind direction.
3 Likes
This past weekend unfortunately rained away,
so no sailing with the default Laser rig with the new autopilot and the new NMEA weather instrument.
But it gave me some time to complete the Wing sail rig 
First, getting sufficient ballast on front of the rig to balance the Trim wing, needed 230 gram.
This ballast consist of:
. a plastic box including the carbon connection tube to the wing
. motor LT2212, KV2200
. ESC 30Amps, 2-3s
. LiPo 3s, 11.1v 1000mAh, 20C

second, getting an antenna on the mast top for RC control and telemetry.
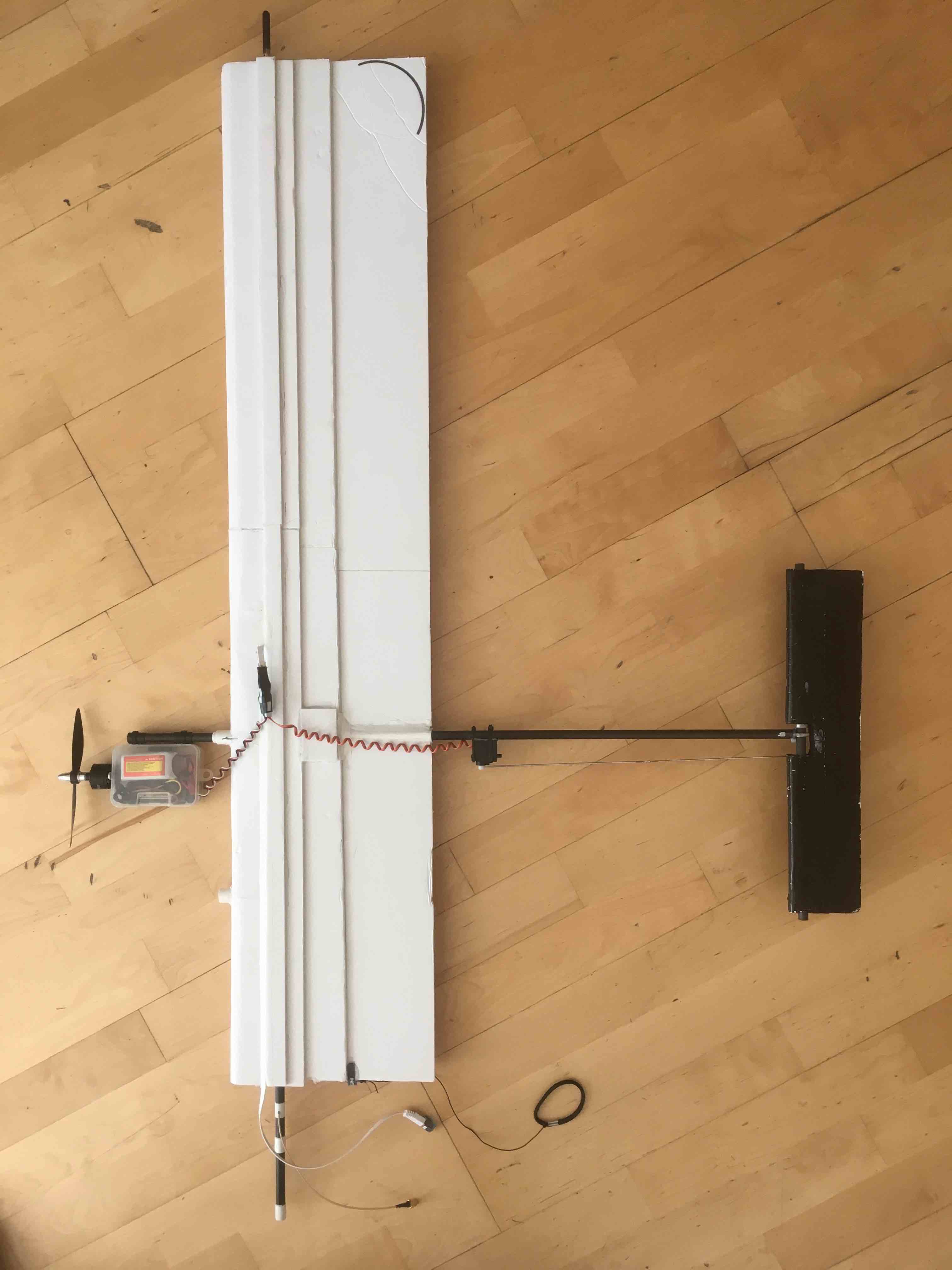
third, getting the ballast to be active not dead materia, not sure if going to use it though.
Hopefully next weekend there will be some sail time.
1 Like
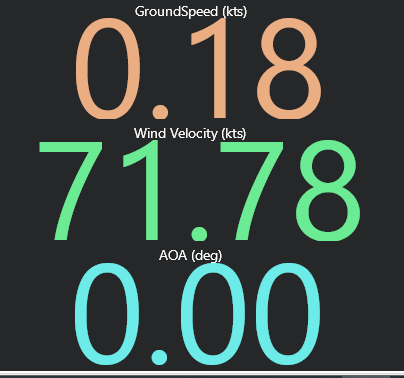
I’m having trouble connecting the argent cups anemometer. The cups anemometer has 2 wires coming out of it, and my understanding is that as the anemometer spins, it simply closes the connection between the wires. My thought would be to connect the two wires to vcc and signal. When connecting this to the GPIO port on the back, do I connect them to the ground/signal pins or the VCC/signal pins. However I can’t seem to get any reasonable reading. Sometimes it sits at 77knots, practically not chaning. Other times no reading at all. This is with both firmwares. So I must be doing something wrong.
I’ve tried connecting to 55 and 54, in both configurations, with both the daily and the custom firmware. No dice.
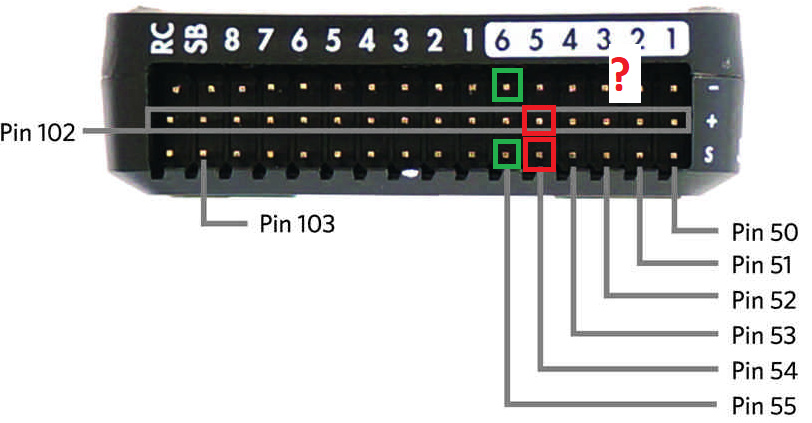
sounds like you need a pull-up resistor, 10k is commonly used. Do they provide a data sheet for the anemometer?
You would connect the two wires from the anemometer to signal and ground then connect the resistor from signal to vcc.
I think it’s the same anemometer @karla was using prior to everyone getting the fancy ultrasonic unit https://www.argentdata.com/files/80422_datasheet.pdf
the tragedy that I threw away the 8 resistors from the original windvane internals to replace it with the hall angle sensor and that Radio Shack is out of business.
Yes, the cup-type anemometer for wind speed is the same I used @patmo141.
I did not need any resistors for it to work. That was needed for the wind vane though.
You can scroll up and check in this long thread.
I think the fact you do have readings is a good sign. Have you checked the factor multiplier…
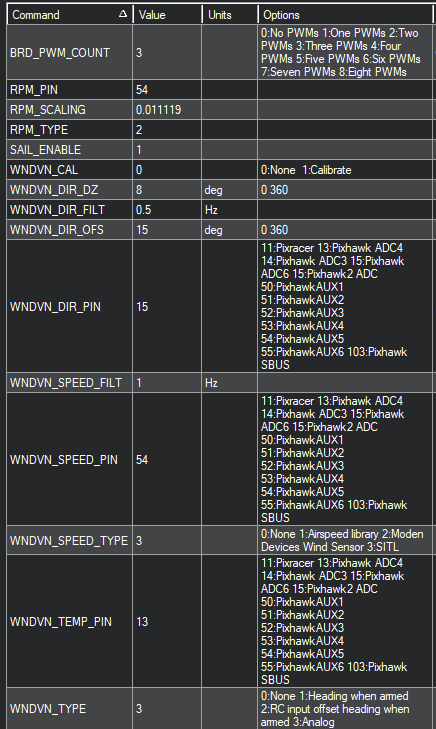
@patmo141 I was thinking of this calculation and setting
. for the wind speed calculation with the cups: RPM_SCALING calculation =
from RPM to Wind speed meter/sec:
Radius= 0.09 meter
Circumference = 2 x PI x Radius = 2 x 3.141 x 0.09
Anemometer drag factor = 1.18 according to their data sheet
Then divide by 60 for the RPM minute to m/seconds.
(0.5654 x 1.18) / 60 = 0.011119
RPM_SCALING = 0.011119
@karla yes I borrowed the factor you provided above. My readings don’t seem like they fluctuate at all with spinning the cups though.
I remember that when I got it to work it was surprising.
Please try to connect one of the wires from the cups to ground and the other wire to signal. No 5v at all involved.
also, you need to spin the cup rotor for 5, 10, 15 sec before it show any speed. There is an average over time. Also you may need to have a lipo attached…
Hey!
some development here
This morning I had a chance to sail the laser with the standard rig with the new autopilot and the new wind instrument
This is a great leap for me from the first sailing, 2 years ago with librepilot.org.
ArduRover sail boat can do tacking to reach target position, and sheet out/in on heeling angle.
I am very inspired of the sailing this morning.
. Manual mode
(+) sails as expected no issues
. Acro mode
(+) keeping course when rudder stick is at neutral.
(+) sheeting in and out depending on wind was correct direction.
(+) heeling at 20 degrees was correctly sheeting out when over reaching.
. Auto mode
(+) reaching wp1 and wp2 and then wp1 again but interrupted by me with a RTL command .
(-) overshooting the target a lot (PIDs?)
. RTL mode
(+) getting there
(-) over shooting a lot in tacking. How to fix?
Please have a look at the video below.
Please understand that the mag was calibrated elsewhere and should have been done at site.
so please turn sound down or limit it since it will complain about
. Bad Baro health
. Error Pos Vert variance
. Error Compass Variance
. Bad Compass health
However, it seems the baro has no impact and the compass is still correct.
The video is over 10 min and it is going from
.Manual
.Acro
.Auto
.RTL
.Manual
I need more sailing trips to understand what needs to be tuned.
Thanks a lot!
K.
The FPV is very cool!. The compass is defiantly quite un-happy, fixing that will probably help quite a bit. On the RTL you can see its heading is nearly 90 deg off from the direction it is moving in. Maybe you can move it way from metal or the servos. my boat has the same issue, although not quite so bad, hard to get any separation when the water proof compartment is so small. Quite tricky to tune up the steering PID’s as its hard to go at a consistent speed, i’m still on the defaults and it is not too bad.
Haha, yes and helpful looking at after the sail to understand what happened.
This morning was time for the maiden sail with the Wing Sail rig.
I started with a new compass calibration at the site.
After that there was no complain of compass variance or any other complains. So I think the location of the mag on deck close to the mast is okay. No servos around but some other stuff, however I can move it around on deck as needed. At the moment it seems totally fine though
The wind this morning is weak, shifting direction, and gusty.
Not ideal at all, but I am eager to get some first try of the wing.
-
I have no prior experience and need to figure out how to sail with a Wing and control tab from ground up.
-
I had to place the boat too far away from where I was standing to get some free wind.
-
Sailing in weak wind means the wing don’t move despite control tab changes.
-
My impression is that the wing can sail the boat well in good wind - has potential,
I just don’t know how to operate it yet. -
After some 14 min of trying to sheet in and out and get some boat speed, I lost patience and turned on the Motor and headed home
Good to have a motor! -
I had the idea that if there is no wind and starting a motor with the control tab at neutral, i assumed the rig would turn to straight forward - I think it did.
2 Likes
looks good!, i know the theory but have also never used a wing sail. It seems to be work OK, as you say more wind will help, I will have to pull my finger out and get the code done.
You hit 1 knot every now and then. That’s not to shabby for a test.
Edit: More than 1 knot