Hello friends:
I am writing to please help me solve the mystery of this cruel accident. On the opening flight of my SABRE UAV in the Autotune process I suddenly lose control of the plane which accelerates brutally and turns to the right. I lose total control of the plane no servo responds and finally crashes.
I flew with a Pixhawk, 4S 4500 800KV Engine 11x6 Pusher. Inmersion R / C long range installed on a Taranys 9XD
Before that the plane flies well for about 4 minutes.
I enclose the Pixhawk log for review and comments.
I am no plane expert but it appears you had a failure of some sort mechanically.
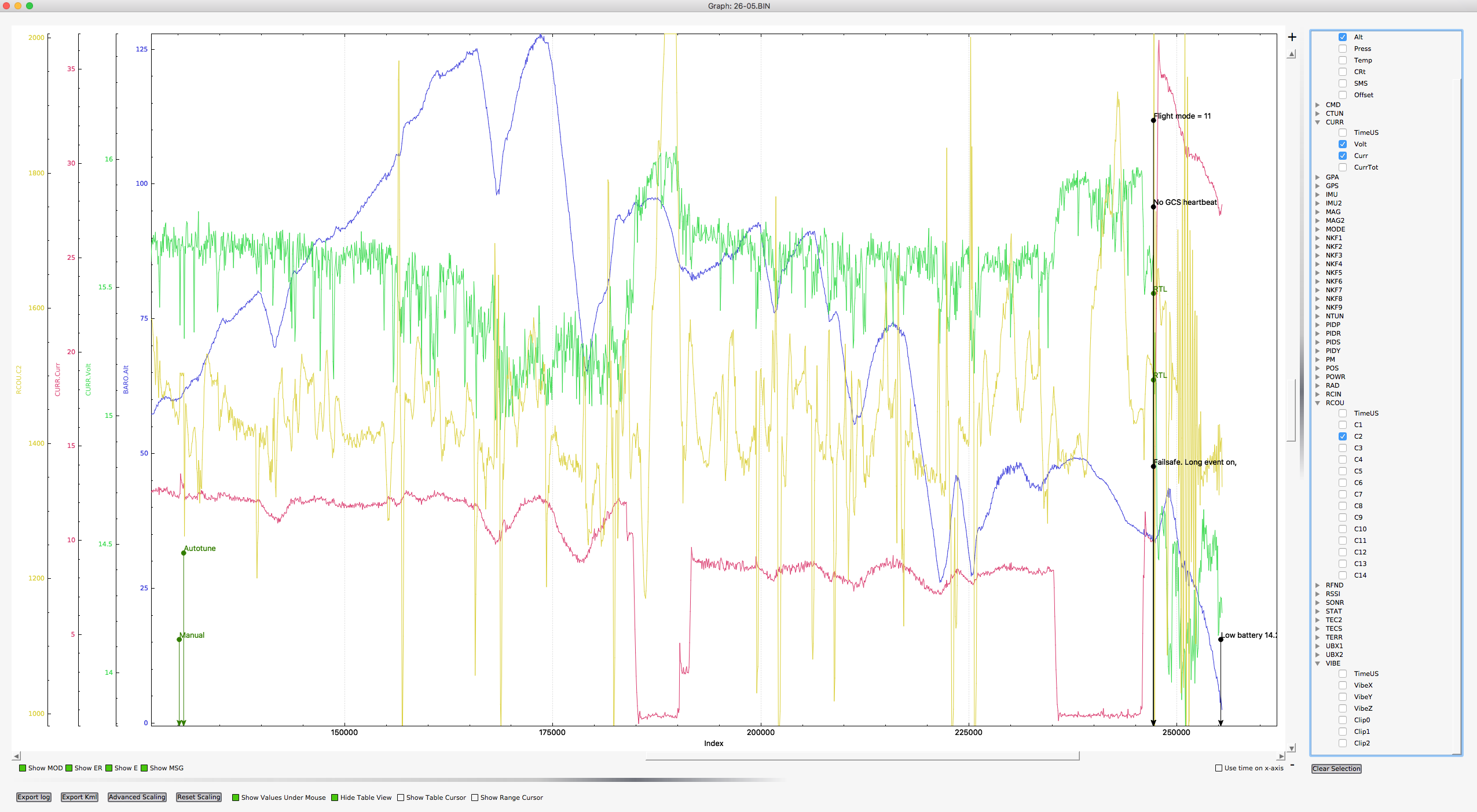
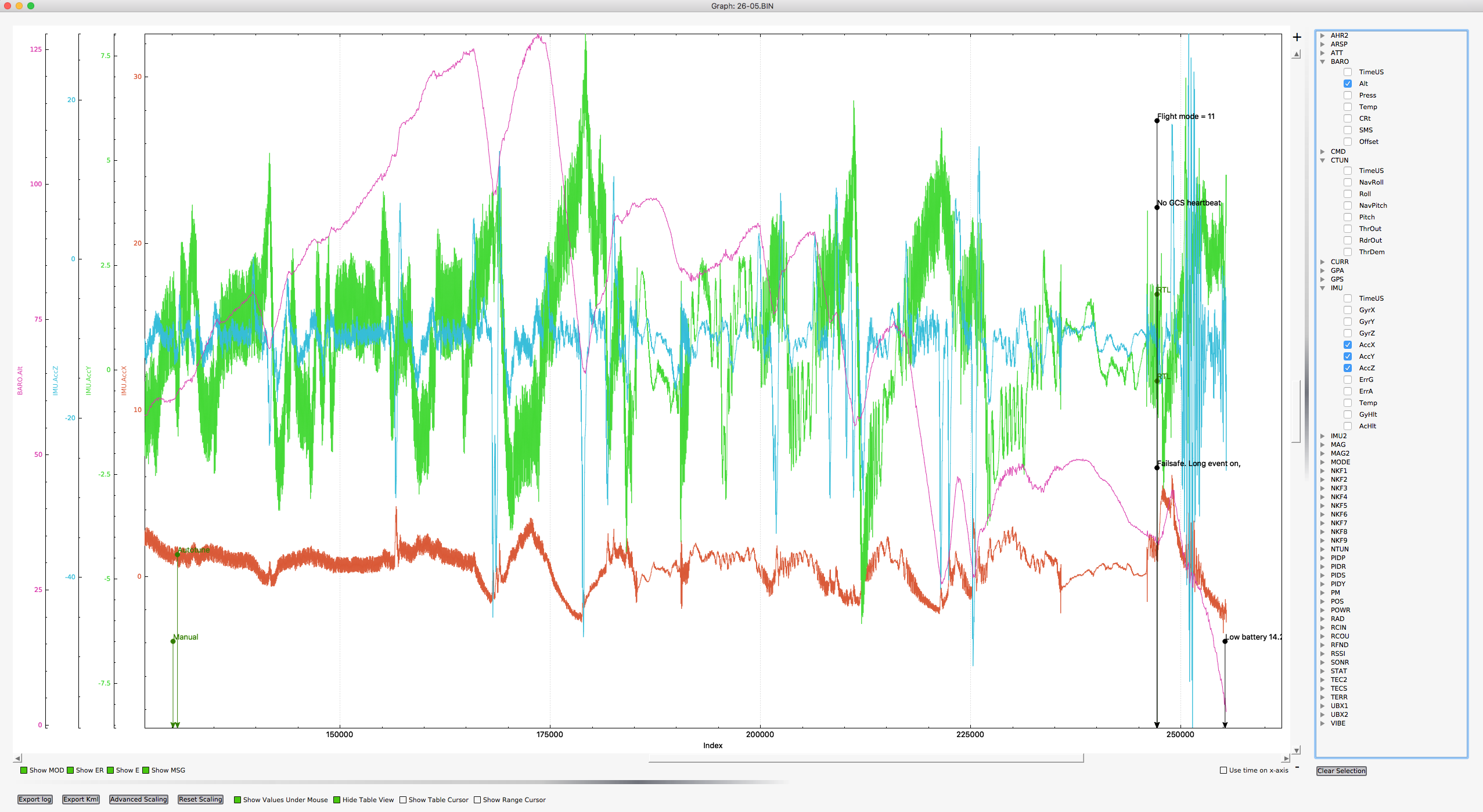
Your power output goes to max, battery voltage drops, and the vibrations rise dramatically.
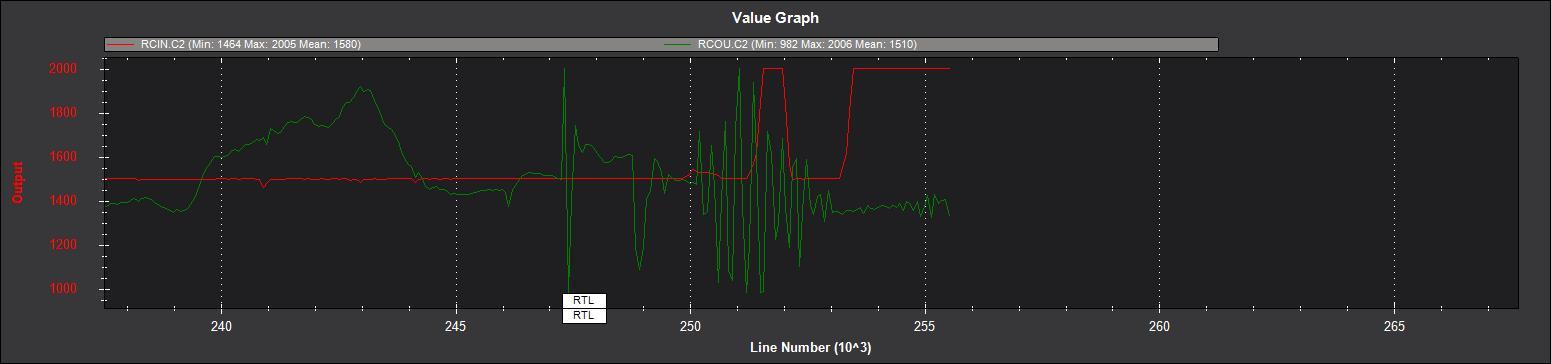
Looking at the RCout both the pitch and roll are maxing out each way, especially the pitch.
Could you have lost the elevator linkage in flight or similar?
Your vibes peak out at the end as well, maybe flutter?
Hi Mike
Thanks for your quick response. After the accident I was able to retrieve the plane almost completely. I did not find evidence of mechanical problems in the elevator. Neither in the ailerons.
There were vibrations right after I lost control but I do not know why they were generated.
I was able to retrieve a gopro camera that recorded the entire flight.
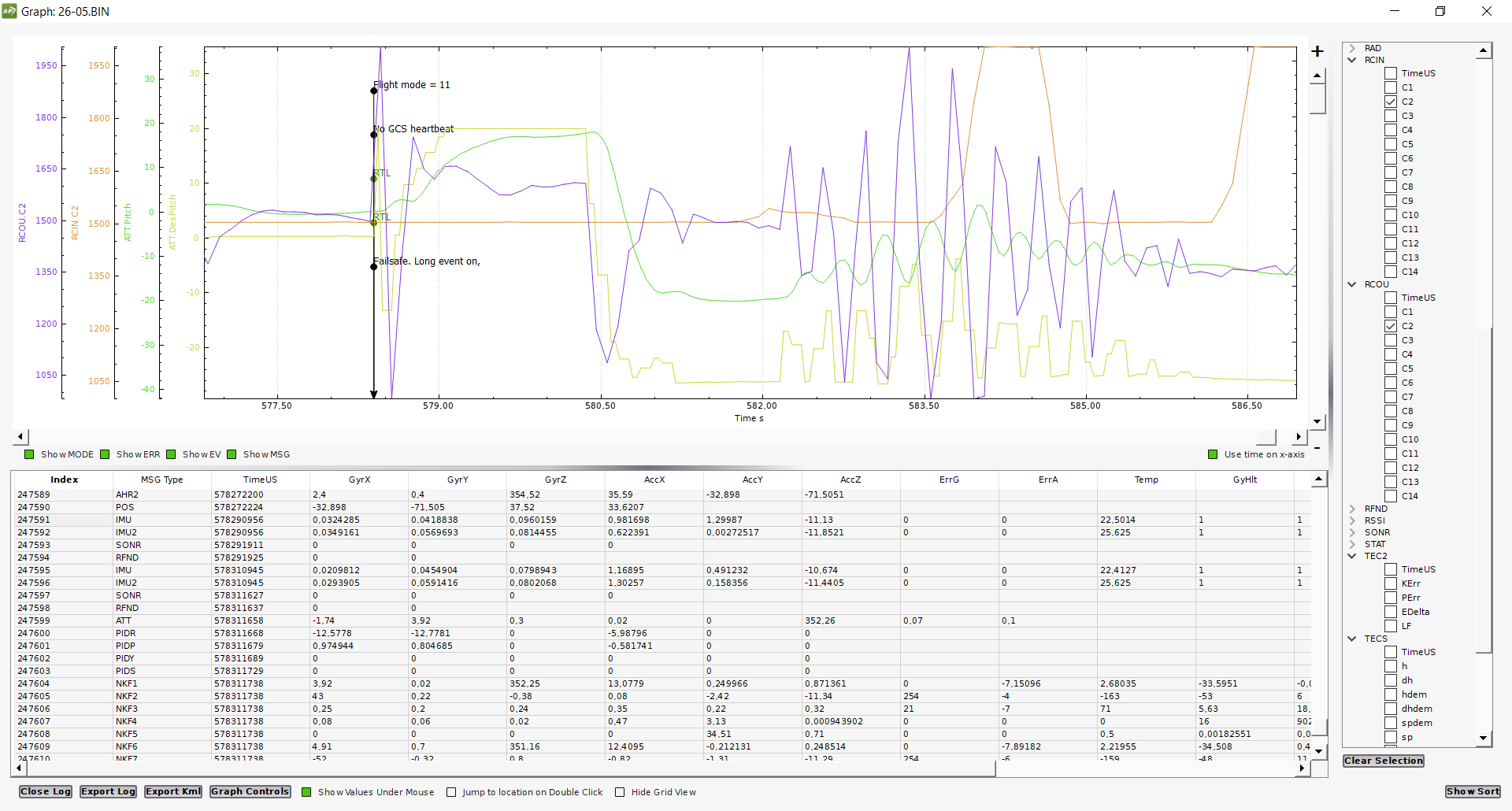
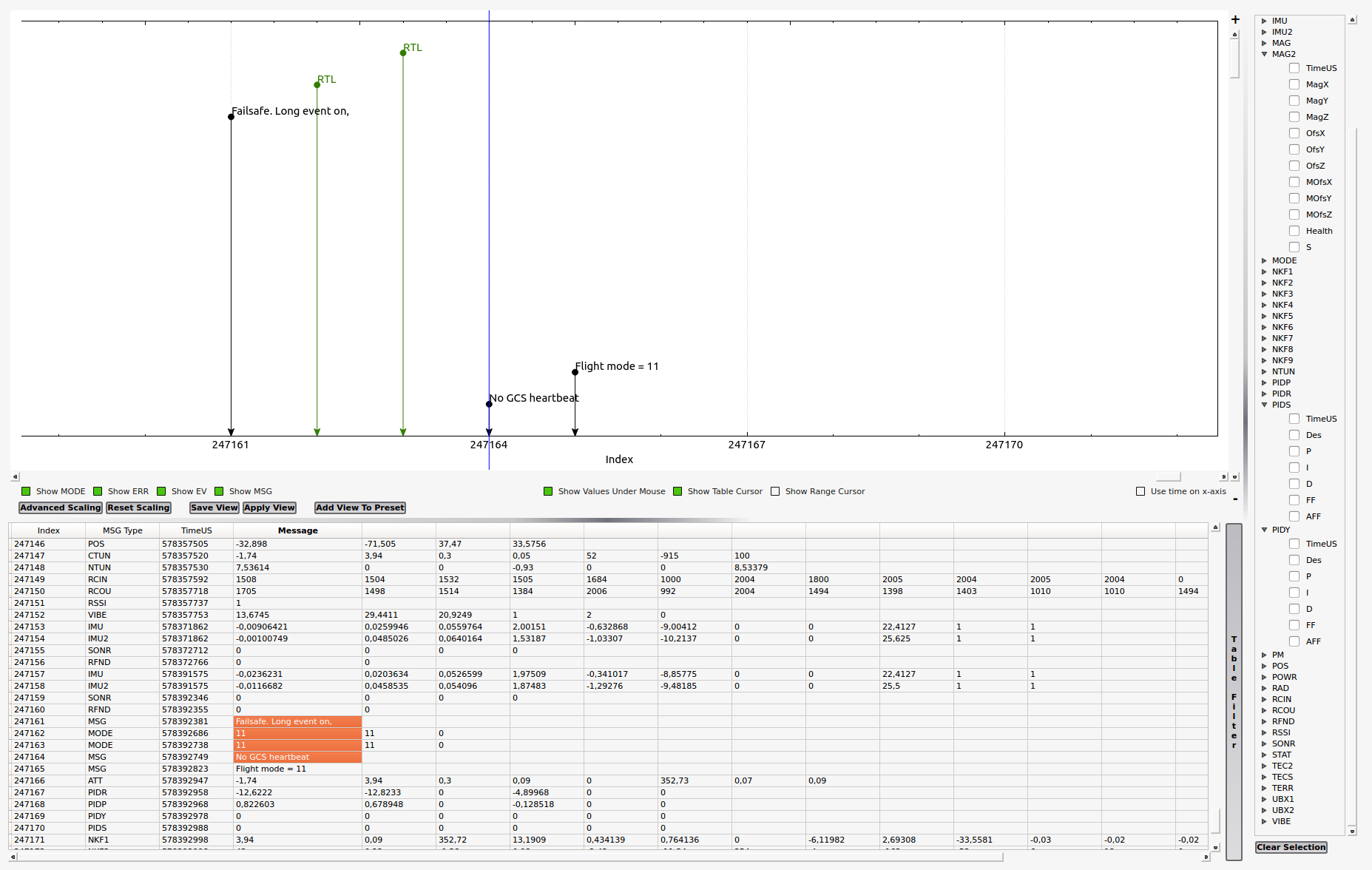
However, in the picture above, after 10 seconds it seems that autopilot somehow gave a nose down command, even though RCin CH2 stays constant. I checked the TECS parameters as well but could not make any sense.
you have set ARSPD_ENABLE = 1 and ARSPD_USE = 1 but your airspeed in the log is not working (values between 0 +/- 1 m/s). Maybe when RTL was activated the plane try to gain airspeed but because of the faulty sensor (did you have an airspeed sensor in your plane?) it was not possible (max throttle). Maybe than it is pitching down to get more airspeed.
AHRS_WIND_MAX: Maximum wind
Note: This parameter is for advanced users
This sets the maximum allowable difference between ground speed and airspeed. This allows the plane to cope with a failing airspeed sensor. A value of zero means to use the airspeed as is.
Range Increment Units
0 - 127 1 meters per second
Hello, thank you very much for your comment.
As I commented to Mirko I think the crash might have been due to the problem of the air speed sensor, however, I have no clue that cause the F/S in the first place.
The plane was not more than 100 m from where I launched it and also had a UHF receiver. The telemetry is also lost and this was transmitted by another antenna in the 900 Mhz.