Hi all,
Yesterday we conducted test flights with a DJI S900 hex frame fitted with a Pixhawk 2.1 Cube running 3.5.7 and Mauch power electronics. The day before we had a successful maiden flight using Stabilize, Loiter, and RTL, and also a successful Autotune run. Yesterday we flew in AltHold, Loiter and RTL, and started experimenting with the sensitivity parameters (because in default mode it flew quite sluggishly) and geofencing, all successfully as well.
Then with the copter on the ground, I tried to reassign the AltHold mode to Stabilize, and got an error in MissionPlanner. Still, the drone managed to take off in Loiter, flew well for a while, after which I flicked the RC switch to AltHold and the hovering drone dropped out of the sky from about 4m, landed on its legs, breaking three arm support pegs and ejecting the battery. I say dropped, but I suspect it still had some thrust, though it was a very hard landing. The drone seems ok, though of course we’ll need to check the power electronics.
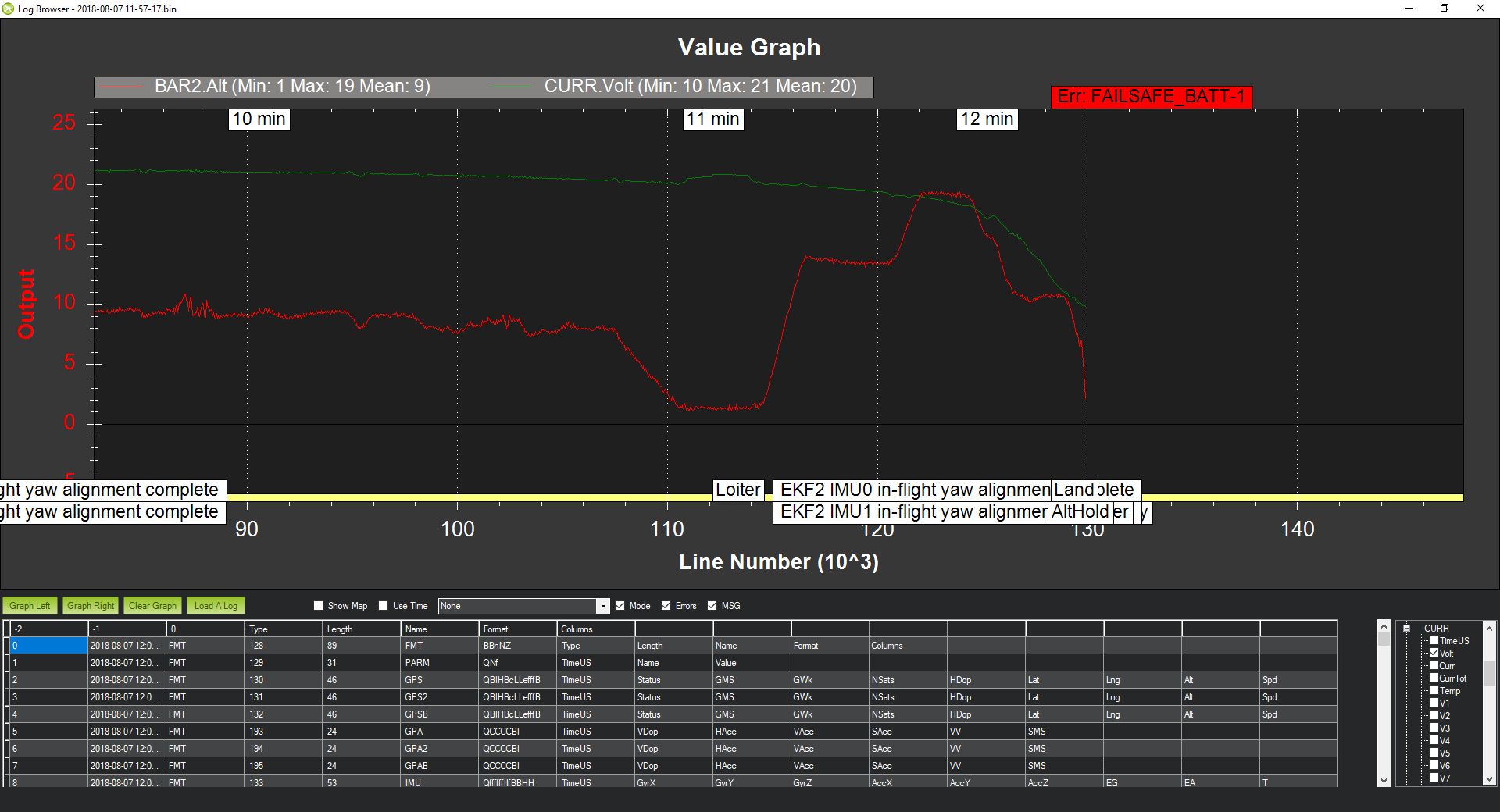
Of course we need to figure out what happened, so this doesn’t happen again in an operational flight. I’m quite new to Ardupilot logs, but there don’t seem to be any major failings. I did plot the altitude (so you can see where the final drop occurred) against voltage and current, and there seems to be a current drop when I switched to AltHold

I also looked in the log for the CTUN.THO parameter, which really spikes as the copter drops.
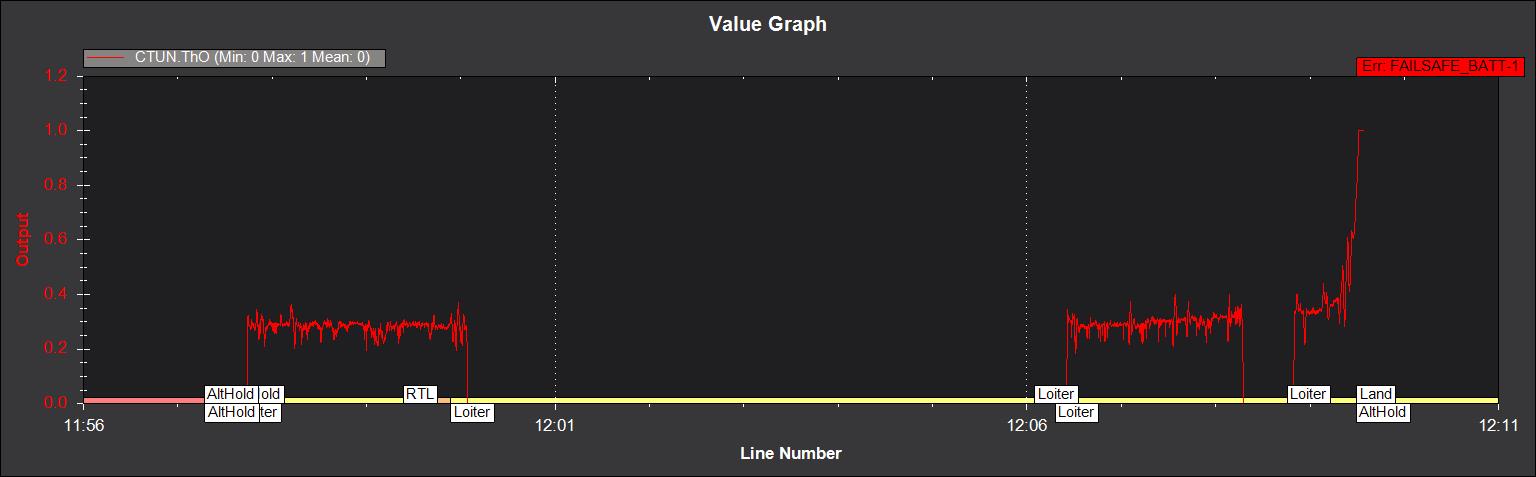
So it seems the controller was trying to keep the drone in the air.
Any ideas on what could have caused this? I’ll add a link to the log here too.
Update: shared the wrong log file, corrected now.