Hello,
I’m having an strange issue with PH2 and S900 upgraded with E1200 motors.
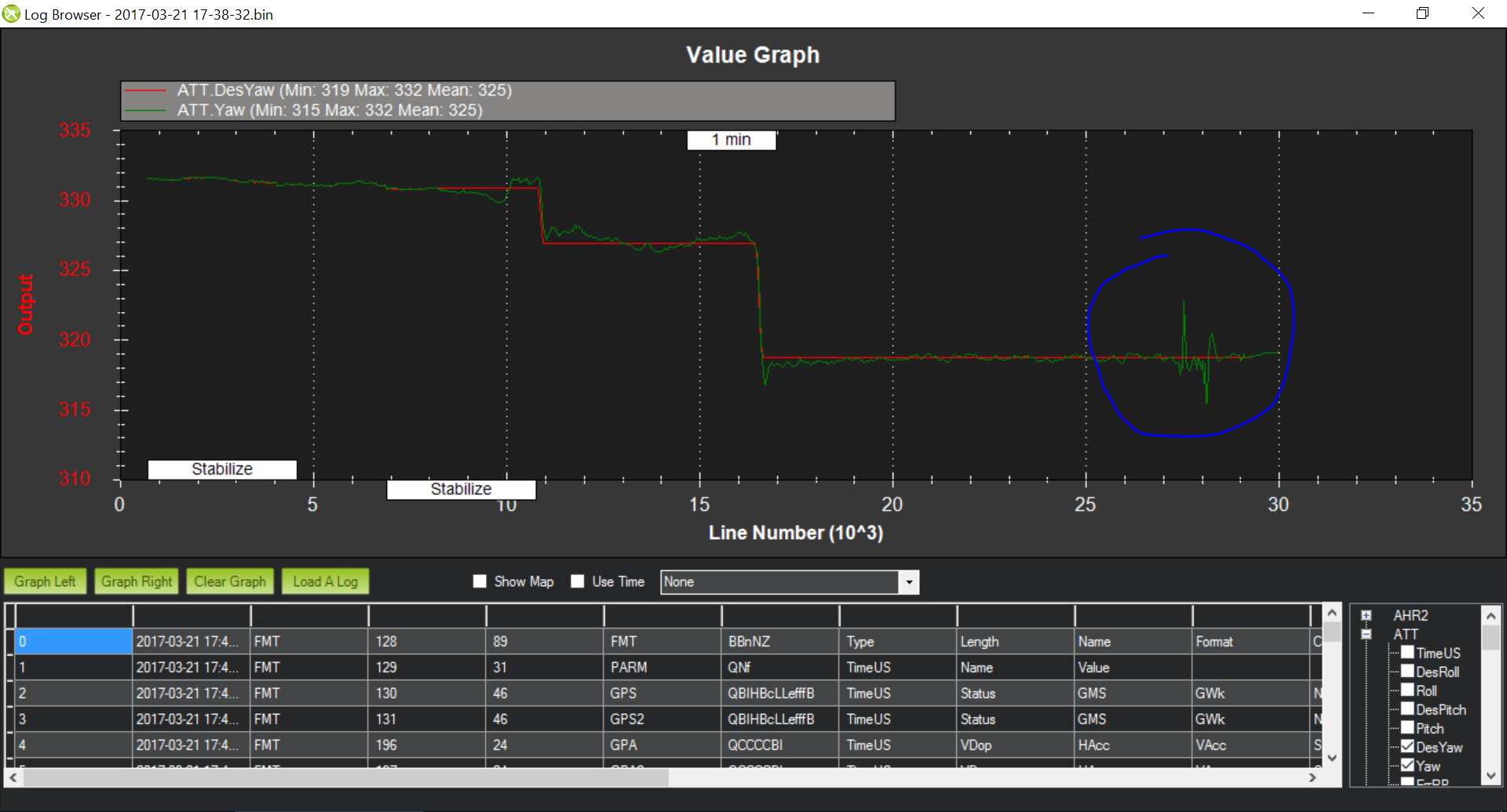
The problem is that sometimes, hardly ever, I have really strong oscilations of the frame, clearly visible vibrations at the frame and arms, like wobbles.
The configuration is: s900 frame, e1200 motors with their arms, latest firmware, ±౩° at each motor like standard dji s900 arms, PH2 sticked at the center of plastic cover for the ESC plugs with white 4 mm foam provided within the PH box latest stable firmware too and latest stable version of mission planner too to adjust and configure, power module connected at one of the yellow xt60 empty plugs at the top of s900 frame, only to power PH, not at the middle of power line. Taranis and x8r rx, mounted at left side of the frame, buzzer at the back of the frame, safety switch at the other side of the rx, led+usb and i2c hub, gps at the top front of the frame, 15 cm over the main frame, galaxy gbs parachute over the top cover of the frame, centered, 16000mAh gensace battery mounted nearer the center place possible leaving 10mm to the bottom xt60 plug, 3 dampers at each side of battery/gimbal mount, 6 black ones at the battery side, 6 gray ones at the front side where a asp 2 axis is atrached (I’ve also tried with 2 dampers at each side), I’ve also tried hard motor dumpers and motors directly screwed to the motor mounts (old and new version of e1200 motors?) and I think that’s all.
I have been adjusting PID’s, checking correct strength of the propellers, calibrated ESC range, done auto tune flights successfully, checked the good balance of weights and G.C. updated FW of PH2, downgraded it too, updated again, re-flashed with rover and again with copter, but I still have this issue.
Today, this morning I did a test flight to start checking and doing more tests.Looking for procedures, coincidences, connections…
First flight has been flying perfectly, without any strange behaviour.
After that flight I have landed and reconnected the battery. It has started to fly really bad again. like it had some lag anywhere and moves like a robotic movement of a robot.
The strange thing is that only rebooting the power (only disconnecting red power cable of the battery, without moving, touching or adjusting anything else), sometimes flies really well, and other times not.
I can’t told which adjustment or procedure works correctly because at this time, I couldn’t repeat any procedure two times with good result.
Maybe it can be relevant, but the strange thing to me is that one boot it flies perfectly, and only rebooting the PH (meaning disconnecting and connecting again main batetery), without moving or touching enithing else, it swaps to a perfect flight to a erratic flight.
Is anyone experiencing that bad and aleatory response of the PH2?
Is anyone having problems with that E1200 motors used with PH?
Is anyone working well with that build?
Has anyone any idea about what can be happening?
Thank you very much in advance!
Log files: https://www.myairbridge.com/es/#!/download/package/UMMXWIGSS2JVN2GA