Hi All;
I’m new to this forum and this is my first post - I also published on the DIY Drones sites.
I’m writing hoping that some of you experts can tip me out.
I’m fine tuning a heavy lift quadcopter: DJI S1000 stock frame+ESC+Motors+props, and Pixhawk 1 FC.
The UAV has a sturdy gimbal to carry a DSLR camera + Thermal Infrared sensor + NIR conerted Canon SX260HS.
I did a Pitch/Roll autotune, and today, after installing AC 3.5.0 FW and a compass and accelerometer calibration, I did a manual inflight tuning (CH6 - Pitch/Roll Rate - KP, KI, KD - Loiter mode).
Overall the performance is not that bad, however it’s not what I’d like it to be: I need a stable ad smooth machine for filming, taking photos and 'photogrammetry work" - for instance hovering in Loiter in extremely light wind is not as solid as one would expect - the UAV moves around visibly, showing some twitchy behavior.
I’m attaching the data flash logs hoping some of you can spot some hints on what could improve the performance (stable and smooth).
I thank you all in advance for your feedback.
Best Regards
Giovanni
Have you checked your IMU XYZ logs. Post a screen shot of them. Vibes are often the reason for poor performance. DJI FC like the A2 and A3 have internal dampening. I had to but my Pixhawk on a proper anti-vibe mount to get a DJI S900 flying properly.
Can you post pics of the mounting you have done with the pixhawk?
I believe I linked both the .log and
.bin files: are you able to download them?
Apologize for the ignorance: what are decryption keys? I use Mission
Planner to directly open the data flash logs…
That one wasn’t encrytpted.I’ll get to it after I’ve looked at my latest log.I’ve just tuned a 960 hexacopter with a Pixhack so there should be some parallels.
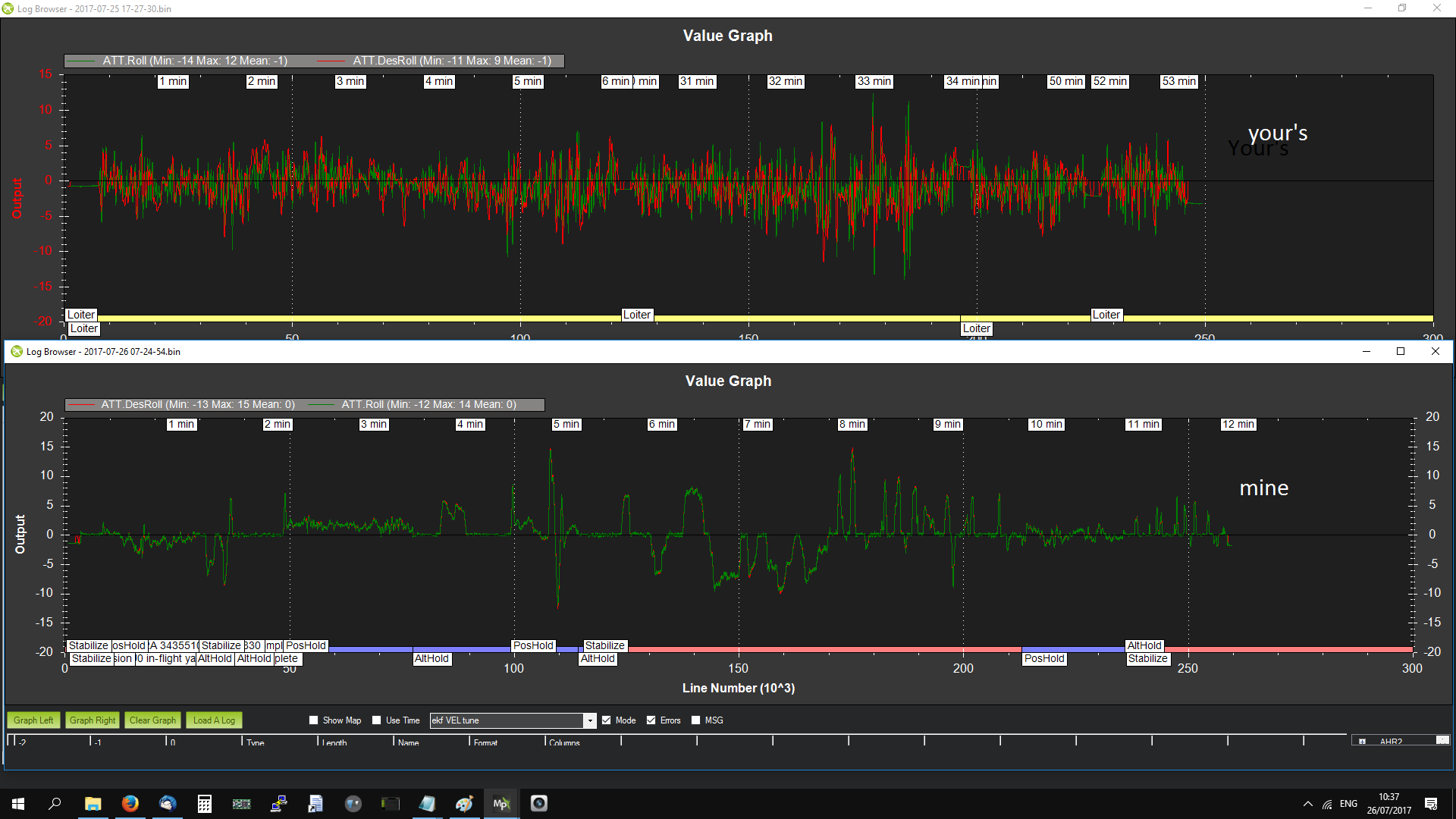
EDIT.It appears your autotune didn’t take.You still appear to have stock figures for PIDs.Here’s a comparison of my parameters and yours showing my values post autotune.You have to land and disarm in autotune mode to save the parameters.I’ve found the position hold version of autotune to be helpful especially when it comes to landing to disarm.
Now, yesterday mine held position hold nicely and smoothely after autotune.Today ,in a stronger wind,it was a bit more twitchy.Certainly not the finished article as this was the first autotune with this FC.But it was better than the stock loadout for sure and is much more acceptable.
And I don’t hold myself up to be an expert.These values are all new in this release and I’m still learning what most of them mean.And I’m just starting out all over on this frame after a failed flight controller swap.So we can learn together.
You can see the difference an autotune has when comparing des roll and roll figures.
Thanks a lot!!! Much appreciated.
I figure I’ll have to run AUTOTUNE again…not my favorite activity…
Do you run it with gimbal/payload (or dummy weight for that matter) attached to the UAV?
I hang extra batteries underneath to bring the weight up,I overdid it a bit with a pair of 20A packs to start with which meant the motors were working really hard.So I dropped the weight a bit for this tune.I always wait for very light winds,preferably still conditions to autotune.I was going to do a second run this morning but the wind got up as I arrived at the field.
I shall probably drop my figures by 10-15 % after the next tune and may even have a go at manual tuning if I get a decent day.At least mine flies acceptably now and doesn’t scare me like it did with the dodgy FC.
Specific arducopter wiki advice is to :- 3. Remove the camera gimbal or any other parts of the frame that could wobble in flight. hence the loading up with batteries to simulate the full loadout.
I’d rather not trash a couple of grand of equipment if I can avoid it.