Arducopter parameters are configured with Analog_Pin=103 and RSSI range from 3,3V to 0,0 V.
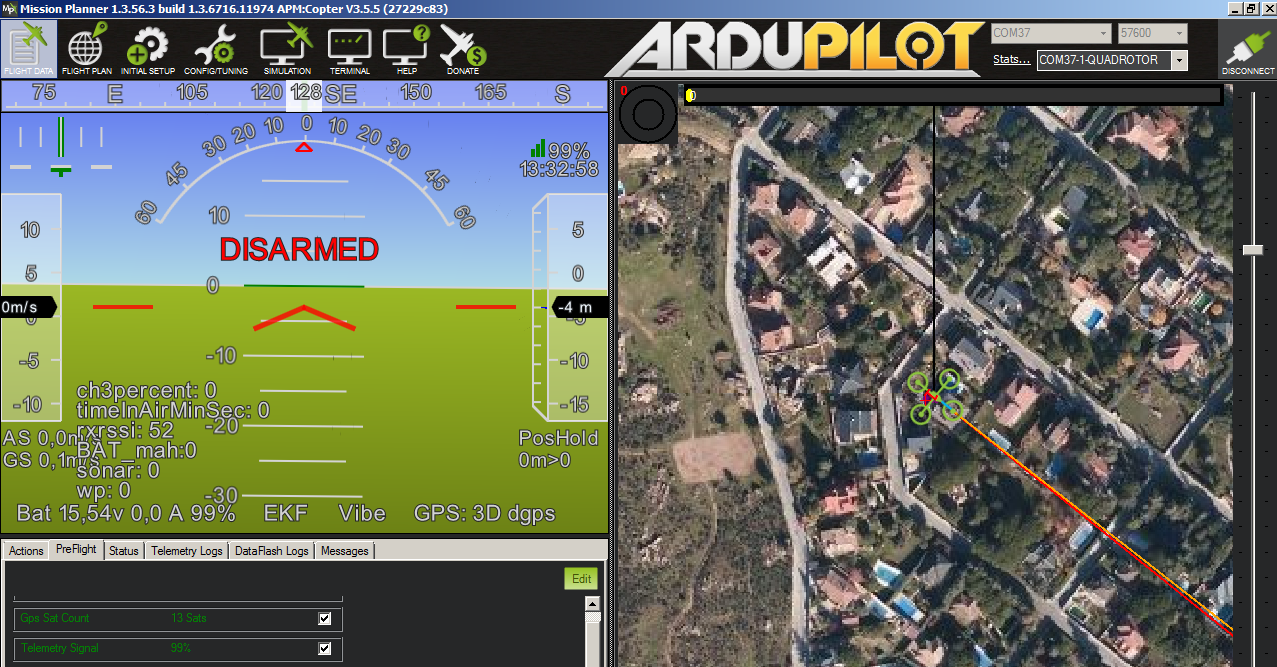
The problem is that RXRSSI values are fixed around 50 (HUD), not ranging from 100 to 0 as expected (when I turn off the Taranis Transmitter).
This setup worked fine in my previous flight controller, a 3DR Pixhawk 1 with AC 3.4.6, but problems arrived when I upgrade the firmware (to 3.5.5) and the hardware (to PH 2.1). So I can’t find a solution to this, as I don’t know if this is a Mission Planner or an Arducopter issue.
By the way, FrSky telemetry has its own RSSI graphical values (displayed in the taranis) and alerts.
That is the way I did it (i.e. I added RXRSSI to HUD with user items) and there is where I see the values I mentioned. Please, see the attached picture
By the way, the hud shows the same values that I can see in the status tab.
So I think there is a problem with Mission Planner or Pixhawk 2.1 (Cube) interpreting RSSI values from X8R receiver (through analog port 103)
Regards,
Eladio
Hi Michael,
I think there is a problems because of the rxrssi range displayed, that should be between 0 and 100 isn’t it? The maximum value I get is 50-52 and, moreover, that value does not change when I turn off the transmitter (so I guess it does not actually reading a rxrssi value).
After reading serveral posts and searching in the web, I haven’t find a solution for this and I don’t know what else I can check.
Regards
I never received successful RSSI from the port on the X8R Rx. Instead I found a far more successful approach is to send the telemetry RSSI value on a spare channel (say Ch16) and configure the RSSI parameters to use PWM channel as its source and the min/max pwm values and then you should see RxRSSI displaying a similar figure to what OpenTx displays on the taranis. To send RSSI over a channel, configure an input in OpenTx with the input source as RSSI (telemetry sensor), and assign this input to a channel in the mixer.