
Why not start Kbar FBL it?
Get rid of the FBL unit. The pixhawk does the same thing and much more.
But,Pixhawk the ACRO model, which is pure manual mode flight, the flight feel bad, and FBL system can not be compared, for example Vbar, MB, SK540 / 720, etc.
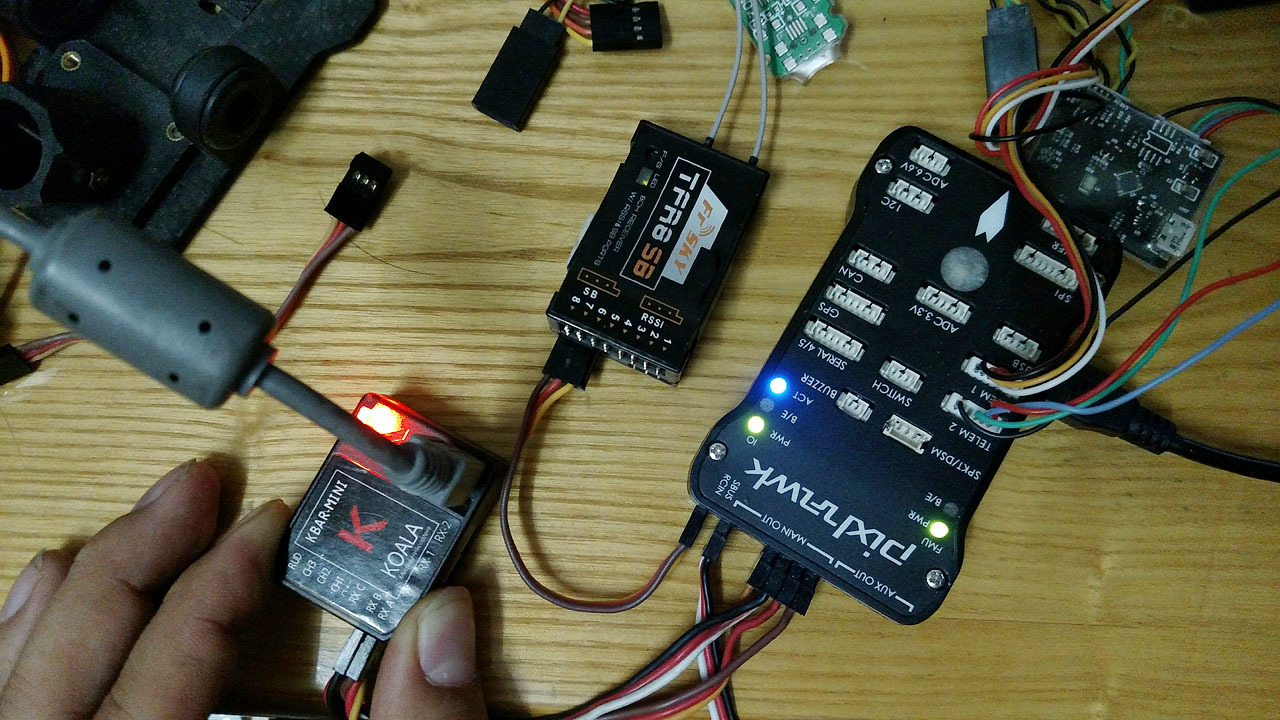
There is no way of s.bus out by Pixhawk connected to Kbar, only the ordinary independent channel mode connection, in order to successfully connect FBL Kbar
So you think the feel difference could be due to imperfect tuning on the pixhawk? It would be worth it to work on the tune as there is no reason pixhawk shouldn’t fly as well or better. You are correct there is no sbus out.
Thank you for your attention!
The problem has been solved, with the help of @ultrafuge, ultrafuge “Suggestions how to setup Pixhawk + FBL-system” post, a complete reminder of me! One of the most important is that before ignoring this one key note:
"Adjust as needed using HS1 / 2/3 / 4_REV = 1 / -1 (1 or -1 to change direction)
DO NOT use the TX to reverse servo direction! "
Now that the problem is solved, I am very happy because it has bothered me for nearly 7 months!
Thank you once again! Thanks @ultrafuge
Sbus input and output problems have been resolved!
Is not enough detailed description of the parameters set, then the value of each trial a bit to find the right settings, the problem is solved!
I agree that the Pixhawk should be able to provide the same control characteristics as a 3axis FBL gyro system. I really think the instabilities seen when increasing the P and D gains are limiting the capability of this system. Somehow the 3axis gyro manufacturers are overcoming this issue. Whether it is low pass filtering or control architecture, they are able to get better flying qualities from the Heli. Just my thoughts.
If Pixhawk ArduPilot AC firmware Acro mode, can have Mikado’s mini Vbar / Vbar neo three-axis gyroscope FBL system of computing, that Pixhawk will be versatile it!
I do not own a 3 axis FBL gyro system however I would love to get some data on one that is being ran through the pixhawk. The test technique is called a frequency sweep and involves oscillating the stick side to side just big enough initially to get +/- 10 deg and then slowly increase the frequency until roughly 2 hz while keeping your stick inputs size the same. There is some inherent risk because you are oscillating the heli but I’ve found that as long as you don’t see any unwanted oscillations when you tuned your heli, you shouldn’t see them during this test. There is one thing you would have to do before conducting the test. You would have to move the logging statement for RCIN from the 10 hz logging loop to the 50 hz logging loop. Let me know if anyone is capable of doing this test and I can provide more info. It would allow me to see when I’ve achieved (using the pixhawk) the control characteristics similar to a 3 axis gyro.
Maybe somebody is interested : https://www.rcgroups.com/forums/showthread.php?1538273-The-Heli-Gyro-as-a-Controller-Theory-and-Experiment
Hi @bnsgeyer
Thank you for your attention!
I saw your test and discussion on filtering frequencies in another topic, and I’m interested in it.
Sorry, my native language is not English and can only rely on Google Translate to communicate with you, sorry.
I am very involved in your test, but I am afraid the language will be easier to communicate problems in the joints.
I really look forward to Pixhawk’s ArduPilot Heli firmware in the Acro mode, can have a FBL system that control the feel and very tolerant of the PID algorithm, and now the firmware, Acro mode operation feel is very bad.
Pixhawk will be even more powerful if ArduPilot AC FW’s Acro-mode control algorithms are available on popular FBL systems such as Vbar, MB Plus and SK540 / 720. Because we know that Pixhawk product hardware specifications are very high.
Look forward to your further study.
Zhangsir
I saw in another thread someone alluded to using a FBL unit with a pixhawk and I’m interested in this as well since units like the 3Digi allow much more advanced configuration of the flight characteristics and support things like external governors where the pixhawk does not. 3Digi also has excellent Jeti integration for tuning from my transmitter.
I’m sure EVENTUALLY the pixhawk TradHeli code might compare to that of the 3Digi but I just don’t see that happening any time soon. Fact of the matter is that FBL units have code that is far more optimized and tuned for the control of a helicopter than the pixhawk.
Yes!
However, ArduPilot’s AC FW does not have an excellent three-axis gyro control algorithm. Pixhawk in the three-axis gyroscope mode control feel bad, so only with Pixhawk + FBL program to make up.