Hi Kevin,
When using the joysticks with QGC and running ArduSub, we used to get that message, but the joystick input was still available for calibration in the setup tab. Rusty at BR later took that message out of QGC. The joysticks must be plugged in prior to running QGC.
Regards,
TCIII AVD
Hi Kevin. I’ve give Don Gagne a heads up about your QGC joystick issue. He is the main dev for QGC so hopefully will provide some input.
When you say it has a bad wobble I really need a dataflash “.bin” log file of the run you did with the thrusters wired correctly and the wobble so I can analyse it. In the mean time NAVL1_PERIOD is the parameter to change. I’ve recently been doing my own tuning on a fast Rover and found changing from 5 to 7 made a big difference in weaving - I’m highlighting here that even small changes to that parameter can make a big difference. If you motor is twitching back and forth try to stay the path I’d probably increase NAVL1_PERIOD.
I just looked at your previous log file and NAVL1_PERIOD is 6. Whilst that’s ok for a rover which can turn really hard a boat is more like a plane in this regard so I would definitely raise it. Probably raise your STEER2SRV_IMAX from 1500 to 3500 as well.
Thanks, Grant.
Joystick support in QGC requires support for the MANUAL_CONTROL mavlink message. The standard ArduPilot firmware does not have support for MANUAL_CONTROL, hence the message. ArduSub added that support in their specific version of ArduPilot. If you are using ArduRover firmware it would require porting the MANUAL_CONTROL support to Rover to get QGC joystick support.
Hi Don. Thanks for following up. I wasn’t aware of the MANUAL_CONTROL message. I’ll have a look.
Thanks, Grant.
@Kevin_K,
If you need joystick control right away, you can use MP which already supports joystick control.
Regards,
TCIII AVD
Grant: Talk to @rjehangir on gitter for details on implementation. I’d hope that it could come across easily. Would be great to have in generic ArduPilot support. Since MANUAL_CONTROL is easier to setup for joystick than RC_OVERRIDE.
1 Like
@FERNANDO_DE_VIDANIA Thanks for following along! Below is a rough component list. I forget some of the screw sizes so just use your best judgement. I’ll have a more complete list in my thesis when that is complete in December. I’ll be sure to post the link.
ArduBoat USV Hull 02.pdf (326.8 KB)
As for why I didn’t use a multibeam…I can’t afford one. The most affordable one that I know of is the WASSP S3/F3 series and that is about $15,000 for a set-up. I would love one of those for my big boat.
@gmorph Ok great, thanks for highlighting what parameter I need to play with. I think I have NAVL1_PERIOD set to 10 right now and then I started playing with the other parameters in the Rover guide.
It’s just a bit odd because RTL mode brings the USV back on a line that is straight as an arrow and AUTO is the one that weaves. I’ll get a log file the next time I’m out.
@DonLakeFlyer Great, thanks for clearing that mystery up for me. Hopefully it can be implemented and I can just drive off a gamepad or the virtual joystick when I am in close quarters for launching and retrieval. I really like all the work you are doing with QGC, it’s very easy to use and looks great for my set-up.
@TCIII Thanks, I may go back and look into it for MP. No rush right now as I got the data I wanted, but I still plan to continue R&D on this.
WOW this is awesome! I built a very similar boat (Same Bali Kayak) but using a trolling motor and rudder system. I have trouble with the T100s getting easily clogged, noticed above you did too.
If by any chance you wanted to try a rudder, just let me know. I’m happy to print it off and mail it to you to help out. Let me know!
Hello gentlemen.
I am building i USV. It`s very much alike the electronic setup Kevin has built.
I`m encountering some of the same issues with regard to skid steering. I think I need a little bit of a push to get it right.
My setup is:
2 Blue roboticT200 thruster
2 Basic Blue robotic ESC (forward and reverse)
Spektrum DX6i
Pixhawk (v3.01 AdruRover)
I read the full post and solutions recommended. Naturally I tried all of them out also with regard to my project,
Still my problem is to get the skid steer setting right.
I have connected the right thruster and ESC to RC1 and the left to RC3.
Still I only have been able to engage the right thruster from RC1. I have swapped ESC and thrusters to verify any hardware issues. All hardware units are OK.
I have also checked the settings of RC1 and RC2
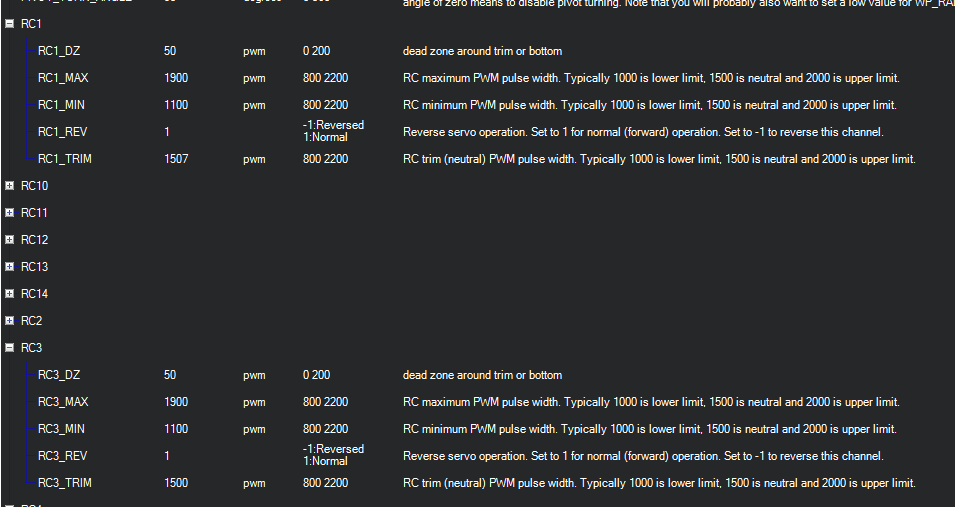
SKID_STEER_IN is set to 1 and SKID_STEER_out is set to 0.
And RCMAP as shown below.

I have attached the logfiles to. Until now its all resting on a test bench. the boat havent been sailing yet due to the issues with the skid steering.
39 07-12-2016 23-33-34.bin (32 KB)
39 07-12-2016 23-33-34.bin.log (39.3 KB)
I am a novice so please be aware of fundamental stuff to:-).
Hope you can help me out. Thank you very much:-).
Best regards
Gregers
@antimattercrusader Great to have you join us here! Your work on DIYDrones is what inspired me to build mine in a similar fashion. The entanglement issue was finally resolved by using Spally’s seaweed deflectors on my T-200s: https://www.bluerobotics.com/forums/topic/seaweed-deflector/ Those completely saved my project.
Thanks for the offer on the rudder, I’m researching alternate propulsion drives right now, so we should get something that doesn’t get fouled as easily.
@Gregers_Rasmussen Ok, let’s get you fixed up!
From reading your description your SKID_STEER_IN/OUT is set incorrectly.
Here’s what it should be:
SKID_STEER_IN=0
SKID_STEER_OUT=1
The IN is only if you have tank track style RC transmitter, there are a few out there. The OUT is the actual differential mixing for your vehicle.
Let me know if that fixes it, if not, we can go from here.
1 Like
Great to know about the deflector. That is fantastic! Thank you! I have a number of smaller boats which the T100 is perfect for, but I’ve been hesitant to use it due to the clogging issue. I’ll print these and try them ASAP.
Thanks again!
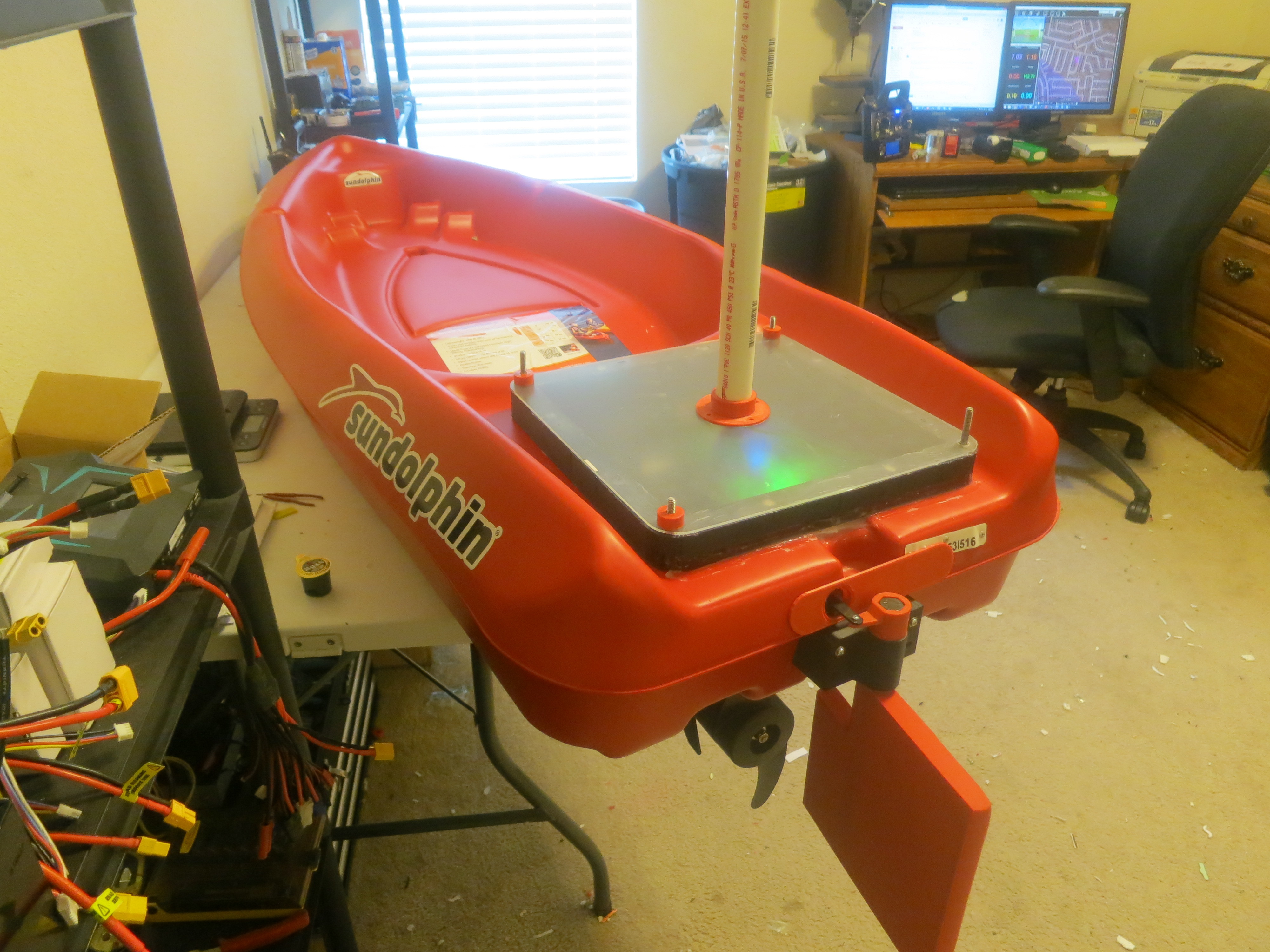
Regarding other propulsion methods, here is one new design:


This is a 1/2 inch bolt, with a 3D Printed Rudder, going up through a floor flange mount attached to the hull, through a pipe, and finally a servo attached to the top of the pipe.
The internals are a similar variation to the image below - which was used on a smaller boat I built - except on this verison the head of the nut is used on the rudder itself to prevent any slippage (instead of on the servo horn). On this version, there is a castle nut with a pin on the inside servo horn - so rudders can be swapped quickly if damaged:

Anyway, I can share more info about how I did the internals, mounted the motor, etc if you’re interested in using this style of propulsion on your future boat.
Maneuverability:
1 Like
Hi
Thank you but i already tried that.
The result is absolutely no response from either the left or the right thruster.
@antimattercrusader Awesome propulsion setup! I may have to just buy one of your hulls in the future. I like the little trolling motor you put on there.
@Gregers_Rasmussen How is your RC receiver connected to the Pixhawk? Through a PPM encoder? I had problems with mine and I simply detached my satellite receiver and plugged it into the Spectrum port and made sure that was bound correctly. That is what worked for me and is still my set-up.
@antimattercrusader: great set-up. Can I ask one question regarding the propulsion, would it be possible to do away with the rudder assembly and set-up the trawling motor to swivel controlled by the steering servo??
Yes, I did try that but found the following:
At full throttle it was stressful on the servo… Perhaps with nice bearings this would not be that much of an issue.
When running into things, rocks, etc - the servo or horn can be damaged. With the current setup, the hard mounted motor will hit things and protect the more fragile steering system. This includes dropping the boat when you slip, fall and slide down a muddy hill haha (last weekend lol)
With no or less throttle/slow speeds, there is less steering authority, this is especially true fighting winds when the boat is lightly loaded.
However such a system should result in less drag in theory, and be more maneuverable. But in my case and with my engineering skills, I don’t think its the best choice.
1 Like
@antimattercrusader, thanks for the insight. Especially the “dropping the boat”, I can relate to that one.
Thanks again, I really like your project.
Cheers,
RS
We’ve been using the Blue Robotics thrusters as well and have run into similar problems as yourself with fouling. We have been looking into some different guards and are wondering what you’ve tried and how well it has worked?

We are going to be testing out the pictured mesh guards shortly but are early in the design process and are looking for any experience in the mattter - How they effect performance, reliability and effectiveness etc?
Hi Liam, we’ve had a bunch of people make 3d printed guards for the thrusters much like that and it seems to work pretty well. A lot of it depends on the type of fouling you expect. Thin, stringy plants and fishing lines seem to be the worst culprits.
Here are the ones I installed on my USV: https://www.bluerobotics.com/forums/topic/seaweed-deflector/
They work very well and I’ve only had one or two strands of eelgrass in the thrusters after about 2 hours of use. Those two strands were probably my fault when I put the USV into reverse. They work great if moving continually forward.
Wow amazing work, great job!
- What do you think your cost for the setup is now?
- Would this setup work with a raspberry pi and a adunio uno?
Very great setup again.