We experienced a weird behaviour. When pressing RLT, the drone did not return to the point that it was armed, but goes towards the point that the pilot is standing. We use MK15 controller, that had turned on GPS location.
We did two experiments, taking off and landing at different locations, while the pilot with the controller also changed position.
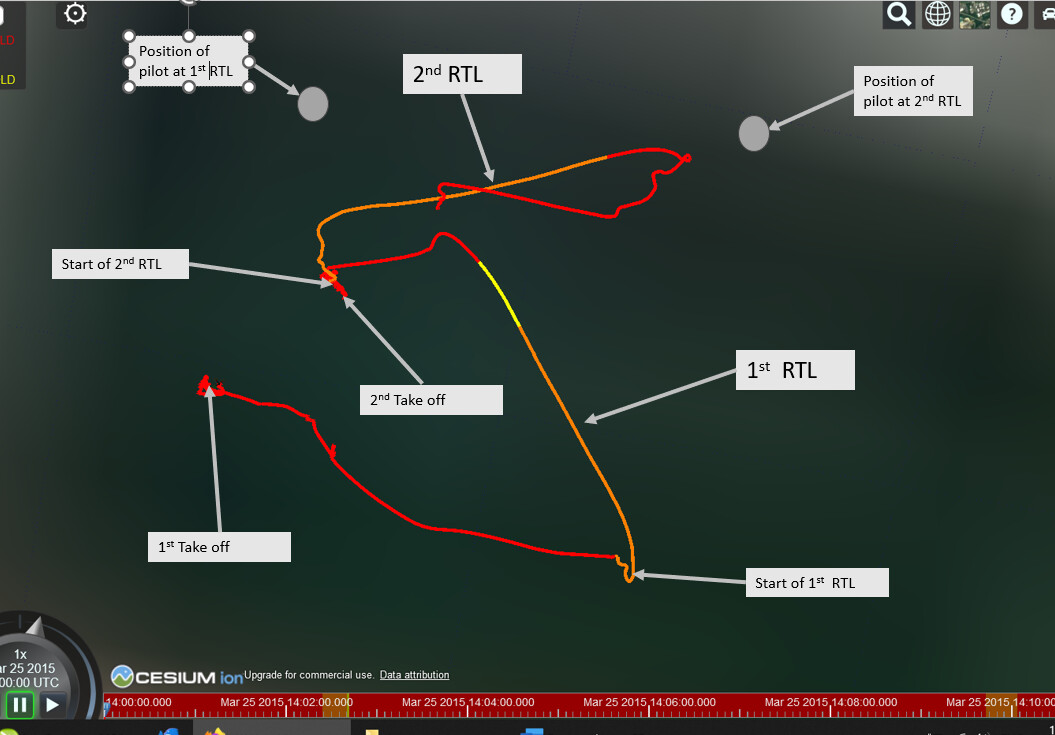
I guess that the Home point is regarded as the position of the controller, instead of the arm point, while what we want is for the drone to return at the position that it was armed.
here are our RTL parameters:
| RTL_ALT | 0 |
|---|---|
| RTL_ALT_FINAL | 0 |
| RTL_ALT_TYPE | 0 |
| RTL_CLIMB_MIN | 0 |
| RTL_CONE_SLOPE | 3 |
| RTL_LOIT_TIME | 1000 |
| RTL_OPTIONS | 0 |
| RTL_SPEED | 0 |