My T-1 Ranger VTOL (tiltmotor tricopter) was coming home via RTL in Forward flight just fine, good airspeed. When it switched to QRTL things went haywire and it went into a spiral dive into the ground. (Thankfully, only vert. stab. broke off from the momentum of the camera on it)
Arduplane 4.4.1 running on Matek F405-VTOL FC.
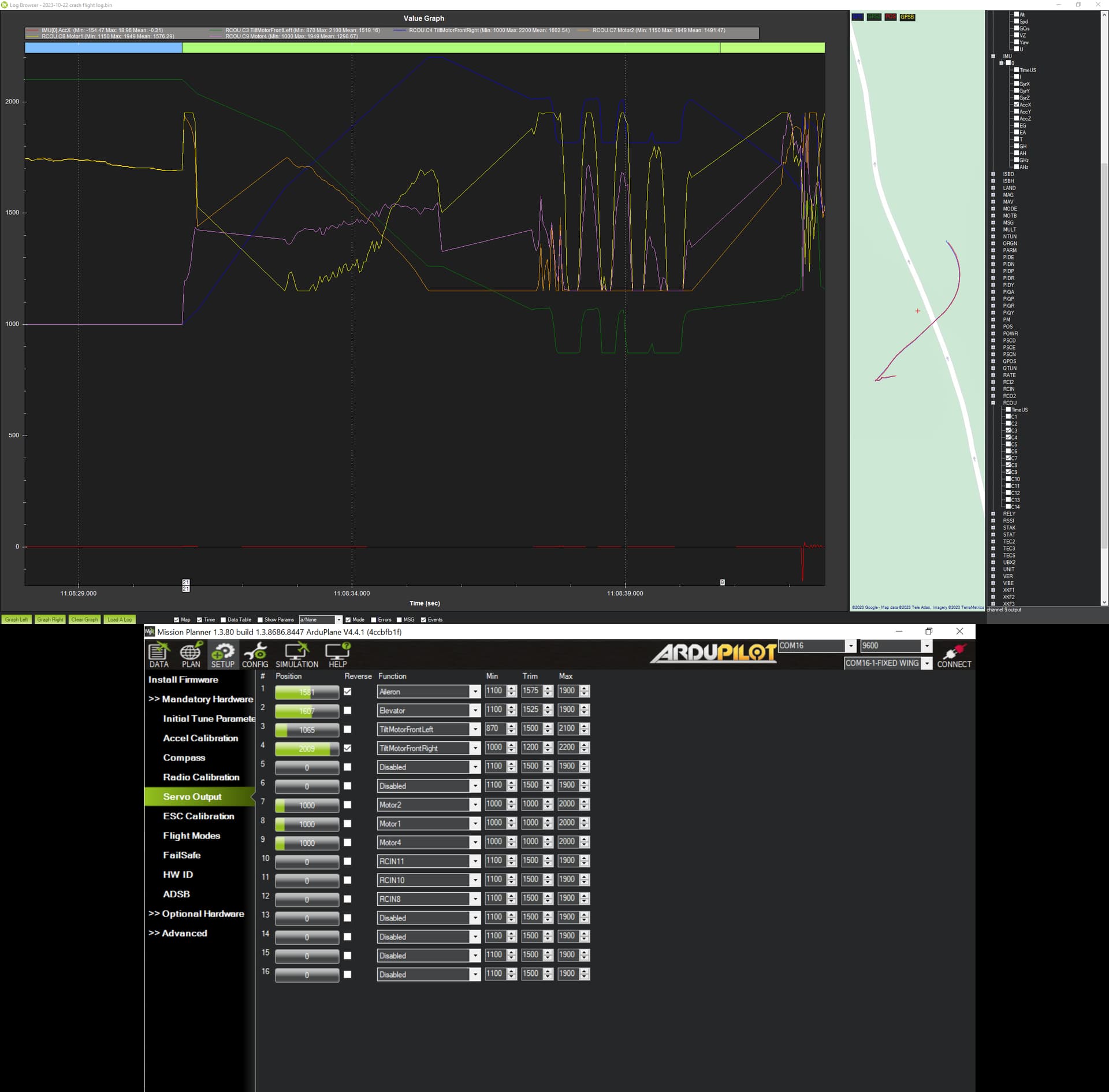
Have a look at the traces below and/or the flight log linked here and let me know if you know why the left ESC went to nearly zero. I would guess the spin was caused by unbalanced front motors.
This was only my 3rd flight. The other two were OK.
Here is a key:
RED trace marks the moment of impact.
GREEN & BLUE are the tilt motor servos (one is reversed).
PINK is the tail motor ESC.
ORANGE is Left motor ESC.
YELLOW is Right motor ESC.
Here is a link to the FPV camera recording. (sorry for the hazy lens. It had condensation on this chilly morning). Before the spin, the OSD indicates a “VTOL Overshoot D=35.4 CS=-9.9 YERR=123.5” if that means anything to you.
There appear to be a number of periods in your logs where recording has stopped.
Recording also stopped just after the transition to quad mode and just before the crash.
During those periods, I suspect that not only is recording to the SD card stalled, but the control loop is also stopped.
When flying in plane mode, a short-term halt of the control loop may have little impact, but in Quad mode, a instantaneous halt of the control loop would be fatal.
Do you see any similar lack of data in the logs during successful flights?
Great observation! I will look into that. It may explain some other mysteries, such as brief dropouts in the Airspeed log trace and brief flashing of all the OSD info in my goggles. I am guessing a power-related brownout would result in a complete resetting of the FC which would take a few seconds, so this is something else. Could it be I am overloading the FC by recording too much black box information at too high a rate? (using default settings in Ardupilot)
I don’t think the logs are large enough to overload the FC.
If there is no missing data in your successful flight logs, I would first consider replacing the SD card.
However, I honestly do not know what caused the crash. My observations may be completely off the mark. I hope you will take it as one of the possibilities.
I had problems with my T1 VTOL, the wing quick connectors had an intermittent connection… A couple times when I transitioned and it did a couple flips but caught itself the intermittent connection worked and that tilt motor transitioned… Just think what happens if you have a loose connection going to the tilt motor and only one side transitions and the other doesn’t???
I have since got rid of the quick connectors and did direct to the flight controller connections… No more issues.