I had a strange problem on the last flight that caused my skywalker to crash.
At one point during the flight, I activated RTL and everything went well, when it got to home and started loitering, the throttle went to 100 and when it started to turn, it started to increase the inclination angle and started going towards the ground, at that moment i’ve passed to STAB to try to get it back but it was too late. Can anyone help me analyze the problem and try to find the possible cause?
Log and dvr record https://drive.google.com/drive/folders/1q8QMjBj4n85M8eUgbO_cQE2wdgJEry3X?usp=sharing
Auto analysis result
No of lines 861388
Duration 0:17:17
Vehicletype ArduPlane
Firmware Version V3.9.6
Firmware Hash a8568402
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = NA -
Test: Brownout = GOOD -
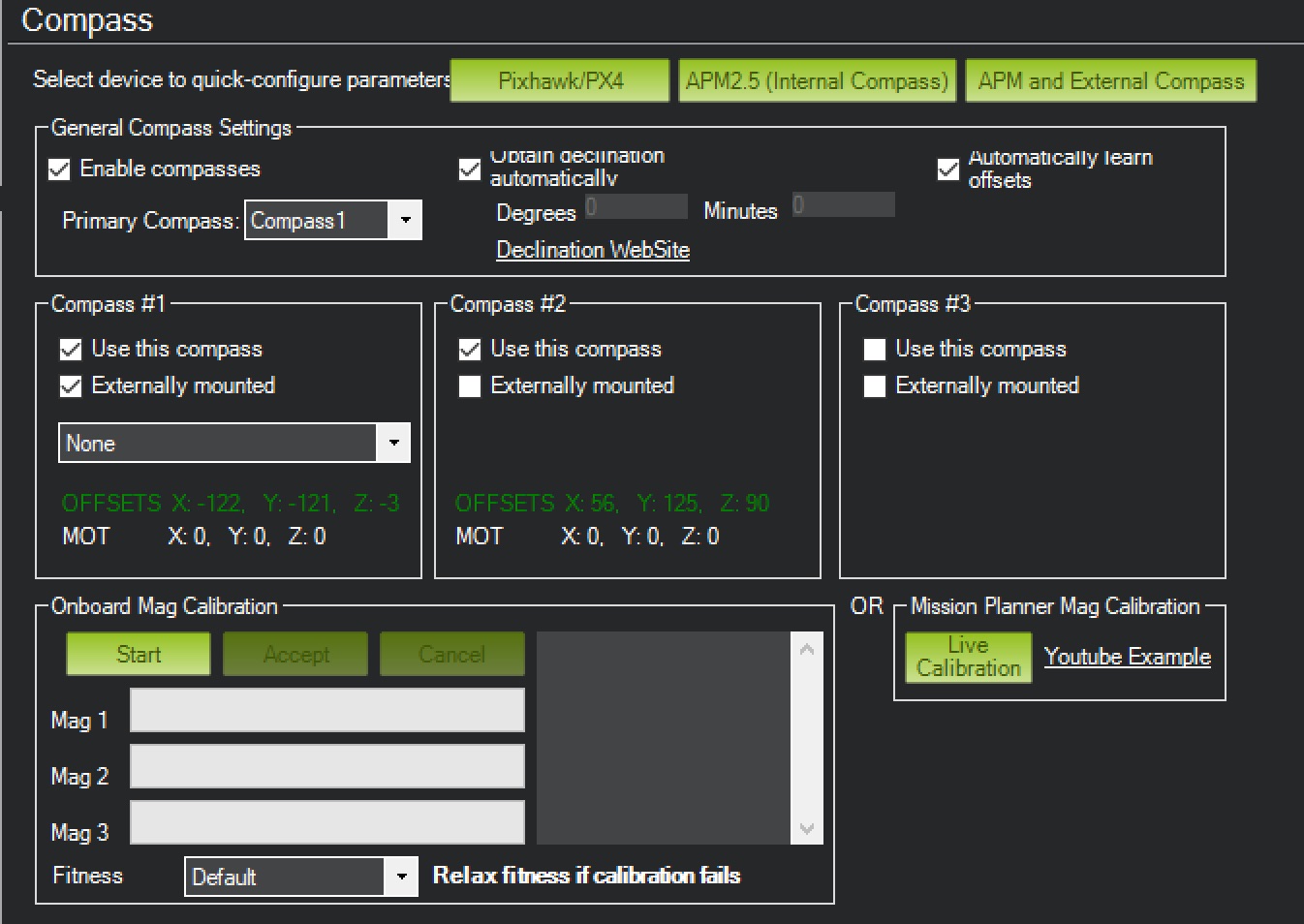
Test: Compass = FAIL - Large change in mag_field (54.53%)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = GOOD -
Test: GPS = GOOD -
Test: IMU Mismatch = GOOD - (Mismatch: 0.50, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = NA -
Test: NaNs = GOOD -
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = GOOD -
Test: PM = NA -
Test: Pitch/Roll = NA -
Test: Thrust = NA -
Test: VCC = UNKNOWN - No CURR log data
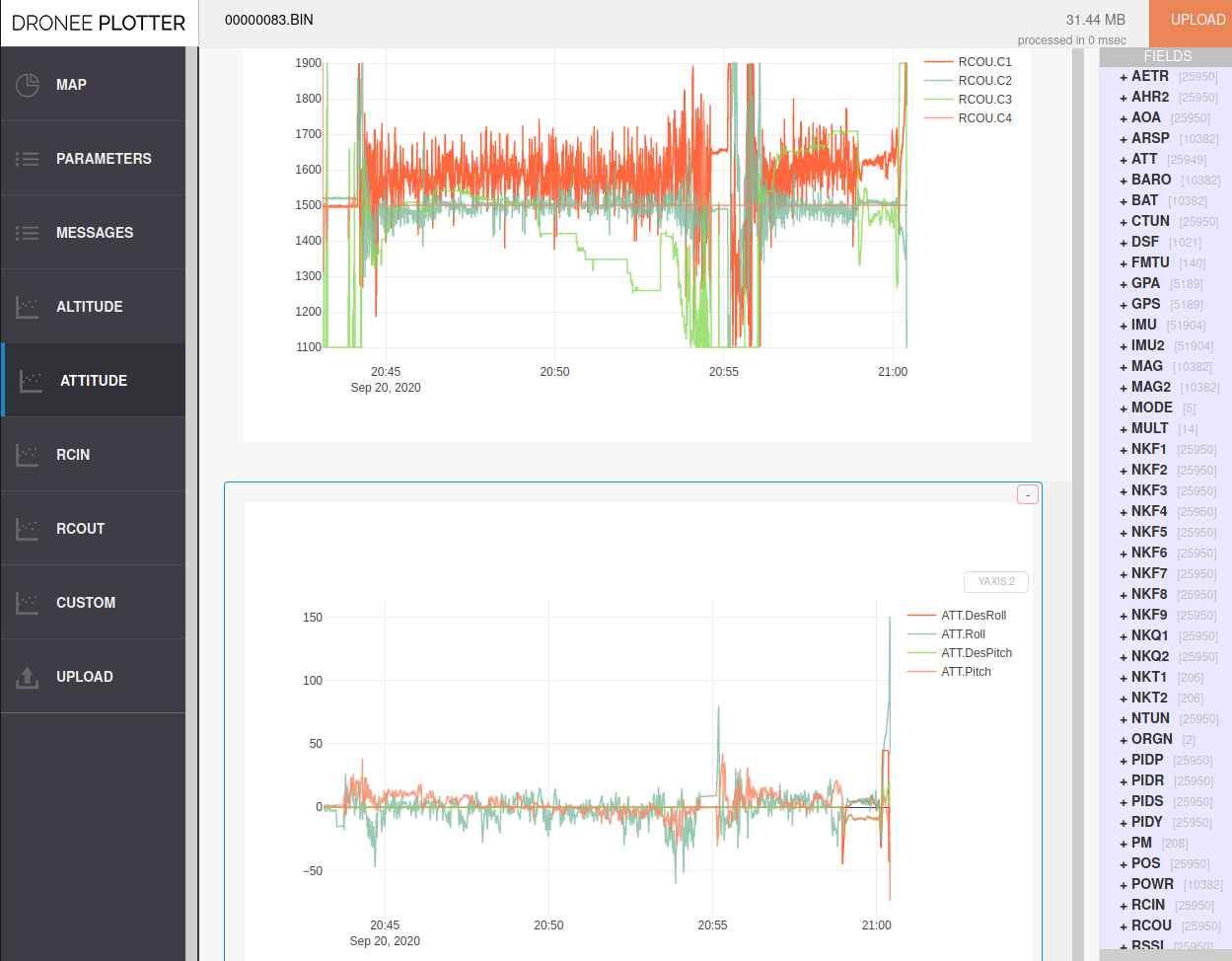
start the issue thr=80% roll 13º
Hi @tridge, is there any chance you can help me determine the problem? i was trying to investigate it with my knowledge and with the help of another experimented person but we did not find why the THR went to 100 and the roll to 73º.
Thanks in advance
You have problem with your compass and your cog seems tail heavy. For full throttle, ardupilot try to compensate … Check Aileron and Elevator at the same time for tail heavy
sorry for late response! thank you very much for your help.
For the compass issue, do i need to recalibrate the compass? or i need to something more?
I’m going to check all the servos again and add a little more weight to the nose