Hello
So I was doing a range test for video using mk32 radio.
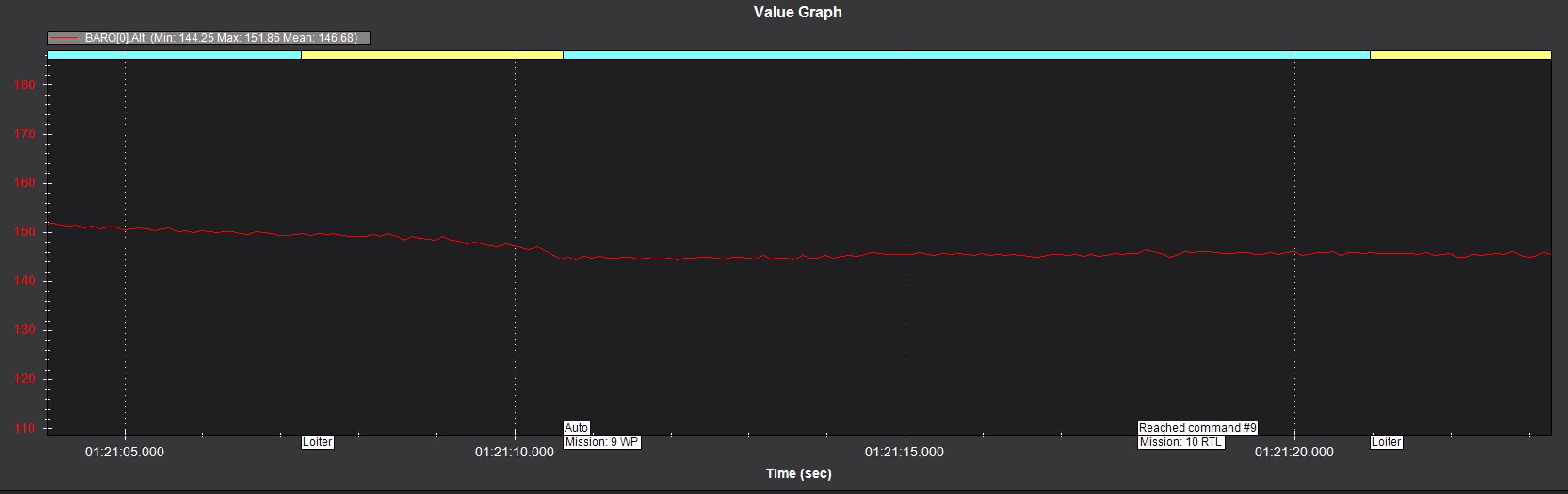
I had put a mission for 7km and return the video link was there when the drone turned for coming back home due to change in antenna postion there was radio loss for less than a minute once it was connected we noticed drone was on RTL but we set prams so that drone continues in auto mission even incase of loss of radio but that didn’t happen.
Prams - FS_THR_ENABLE-2
Do I need to make changes in
fS_OPTIONS
Attaching bin file
https://drive.google.com/drive/folders/1cjlwLdgQqebbsE5l87Qt3F71aDI3M6ji?usp=drive_link