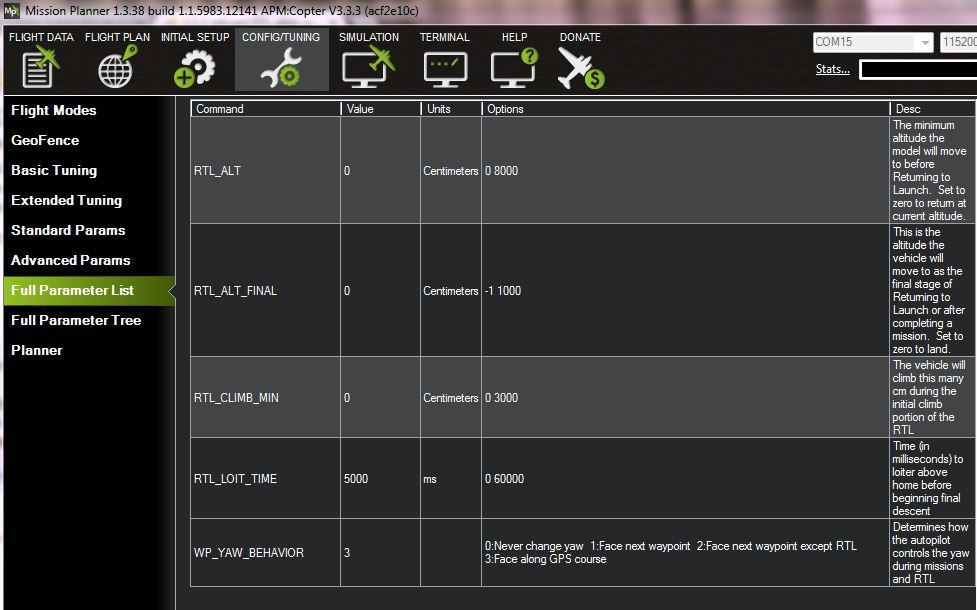
Using Mission Planner 1.3.38 Arducopter.
-
Test 1: After checking GPS lock and low hdop on the laptop, takeoff in loiter. move a bit and initiate RTL: Everything ok. (set 0 altitude so land and switch off motors).
-
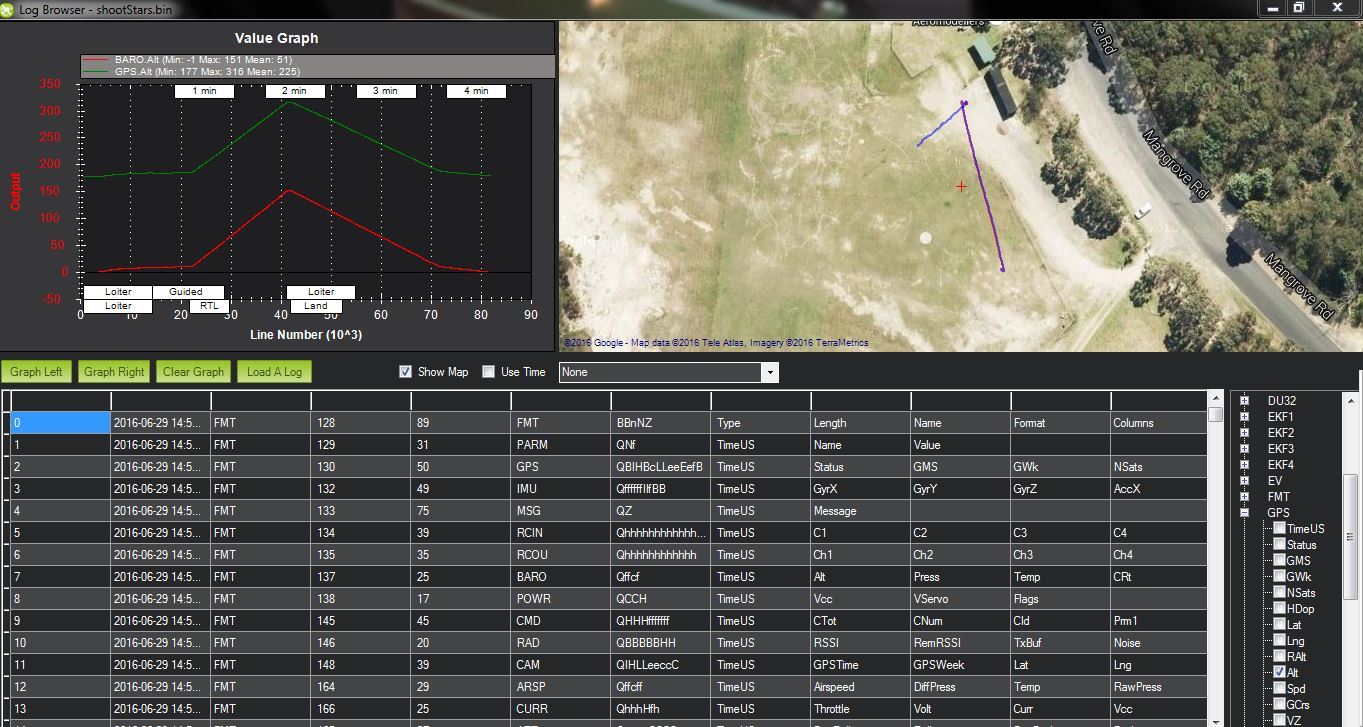
Test 2: As above Loiter then engage follow me. The aircraft follows very well no issue. Click on [STOP] (follow me.) Try to initiate RTL (from Tx) but aircraft climb… climb some more and even more! Abort RTL and try to initiate land (From Tx): landed.
Problem seems that follow me is changing something and RTL is not possible even after clicking on the [STOP] in the little follow-me window.
Any help welcome.
Henri