Every time I enable OA_TYPE,1, RTL does not work. My copter rises to the RTL altitude but does not return, stays at the waypoint forever. After I set OA_TYPE back to 0, RTL works fine. I use one Radar Rangefinder facing front. Currently running Arducopter 4.0.5 . I use LOITER, AUTO and RTL on my flight modes. My radar readings show up perfectly in Mission Planner’s proximity viewer.
One question, will there be a option to just stop the copter in OA_Type 1 (or change to Loiter mode when in Auto sensing a obstacle)?
I´m asking since using only one Collision avoidance radar looking forward, I noticed that the copter now tries to move to one side. Since he does not have sensors on the side, he will colide with side obstacles.
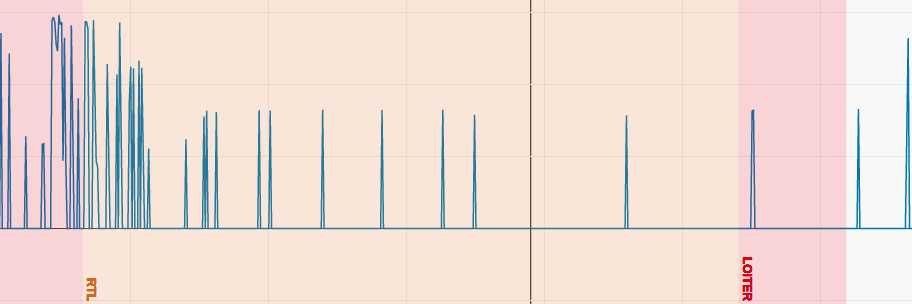
Do you see those spikes in the data from the RangeFinder… that is being stored in the obstacle avoidance database as obstacles, that is why during RTL you’ll see that BendyRuler was active.
Possibly, the sensor you’re using might not be working properly or it maybe a driver issue, its not a problem with Obstacle Avoidance for sure.
Thank you for your time and explanation. I will check what is causing the spikes. What parameter (data) are you looking at in order to see this spikes?
Hi Ulf,
In the logs you can see the PRX.D0 (proximity logs) OR RFND[1].DIST (rangefinder logs) … both of them should be the same since you have configured your rangefinder as a proximity avoidance sensor.