Can any one help me with this problem the drone was working fine I changed to ppm mode and added a 5 in l power module I’m running a adrupilot 2.6 when I try a rtl it goes up comes down to land goes crazy and crashes I’m trying figure out how to load log files
58 12-31-1969 6-00-00 PM.bin (144.9 KB)
57 12-31-1969 6-00-00 PM.bin (242.3 KB)
56 12-31-1969 6-00-00 PM.bin (410.4 KB)
OK, so the flight controller is an OLD APM (Ardu Pilot Mega) 2.6.
How did you “change to PPM mode”? Include EVERY STEP and include pictures of ALL of the connections to the APM, receiver, GPS/Compass and so on.
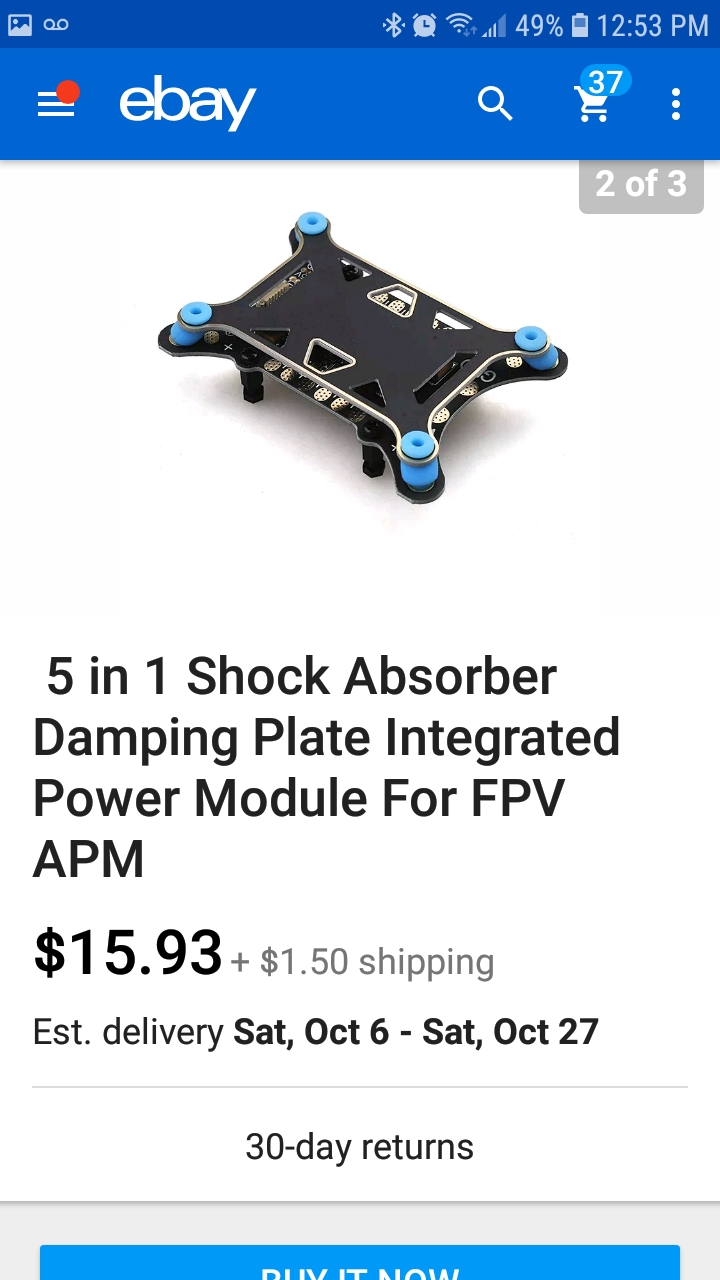
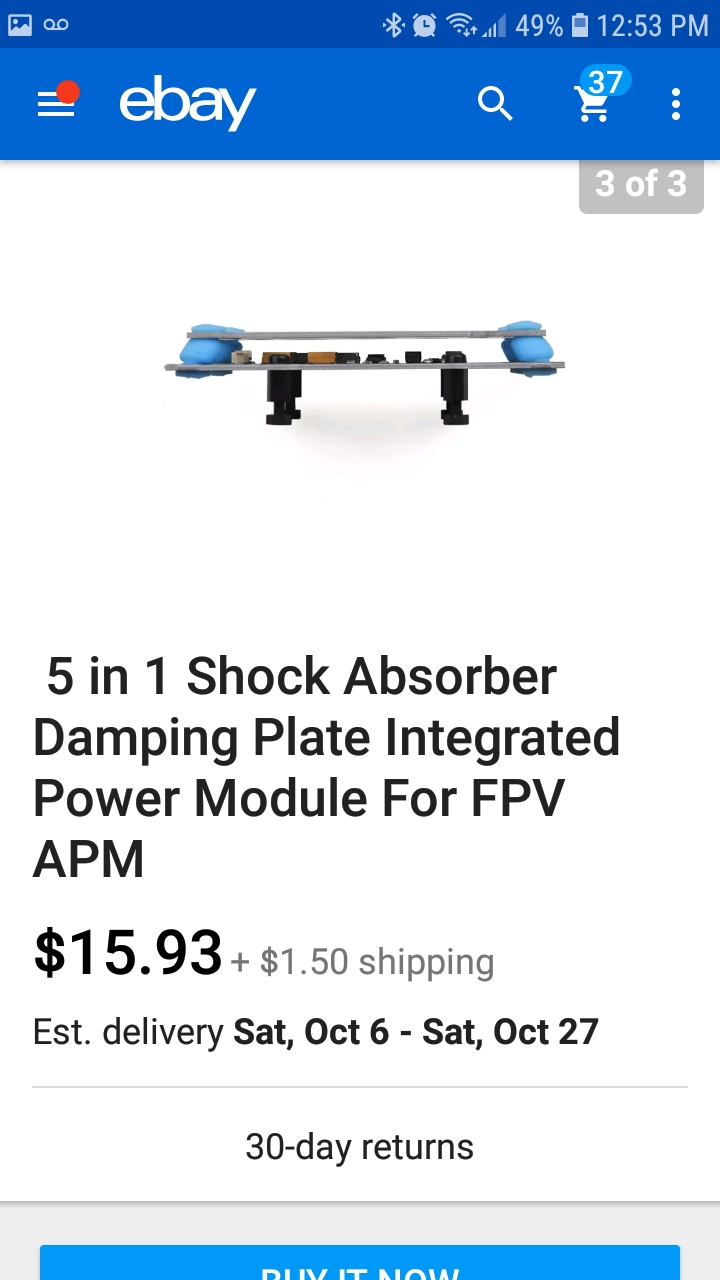
What EXACTLY is a “5 in 1” power module?
[Oldgazer](https://discuss.ardupilot.org/u/oldgazer1) September 25OK, so the flight controller is an OLD APM (Ardu Pilot Mega) 2.6.
How did you “change to PPM mode”? Include EVERY STEP and include pictures of ALL of the connections to the APM, receiver, GPS/Compass and so on.
What EXACTLY is a “5 in 1” power module?
Visit Topic or reply to this email to respond.
To unsubscribe from these emails, click here.

[Oldgazer](https://discuss.ardupilot.org/u/oldgazer1) September 25OK, so the flight controller is an OLD APM (Ardu Pilot Mega) 2.6.
How did you “change to PPM mode”? Include EVERY STEP and include pictures of ALL of the connections to the APM, receiver, GPS/Compass and so on.
What EXACTLY is a “5 in 1” power module?
Visit Topic or reply to this email to respond.
To unsubscribe from these emails, click here.
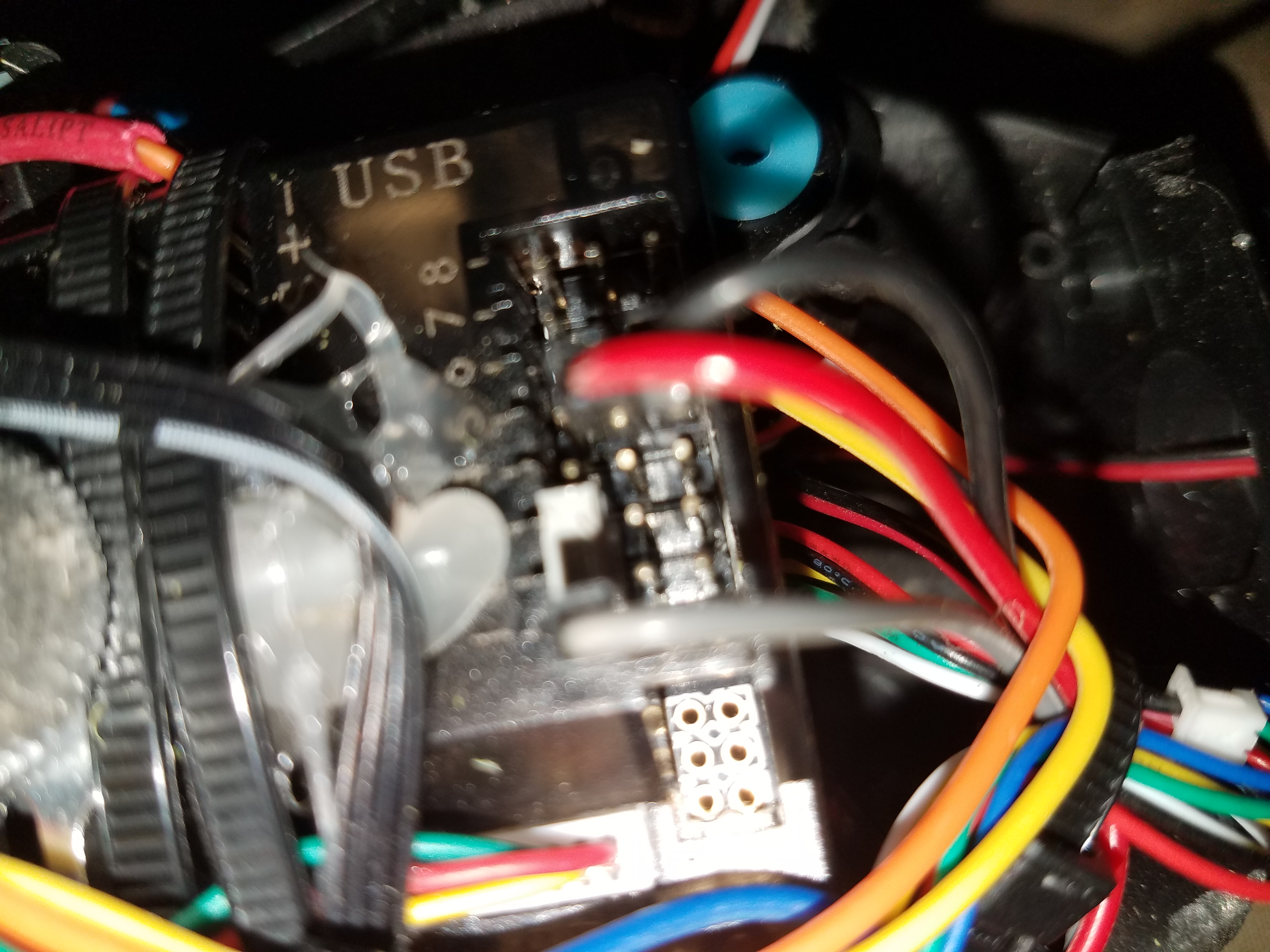


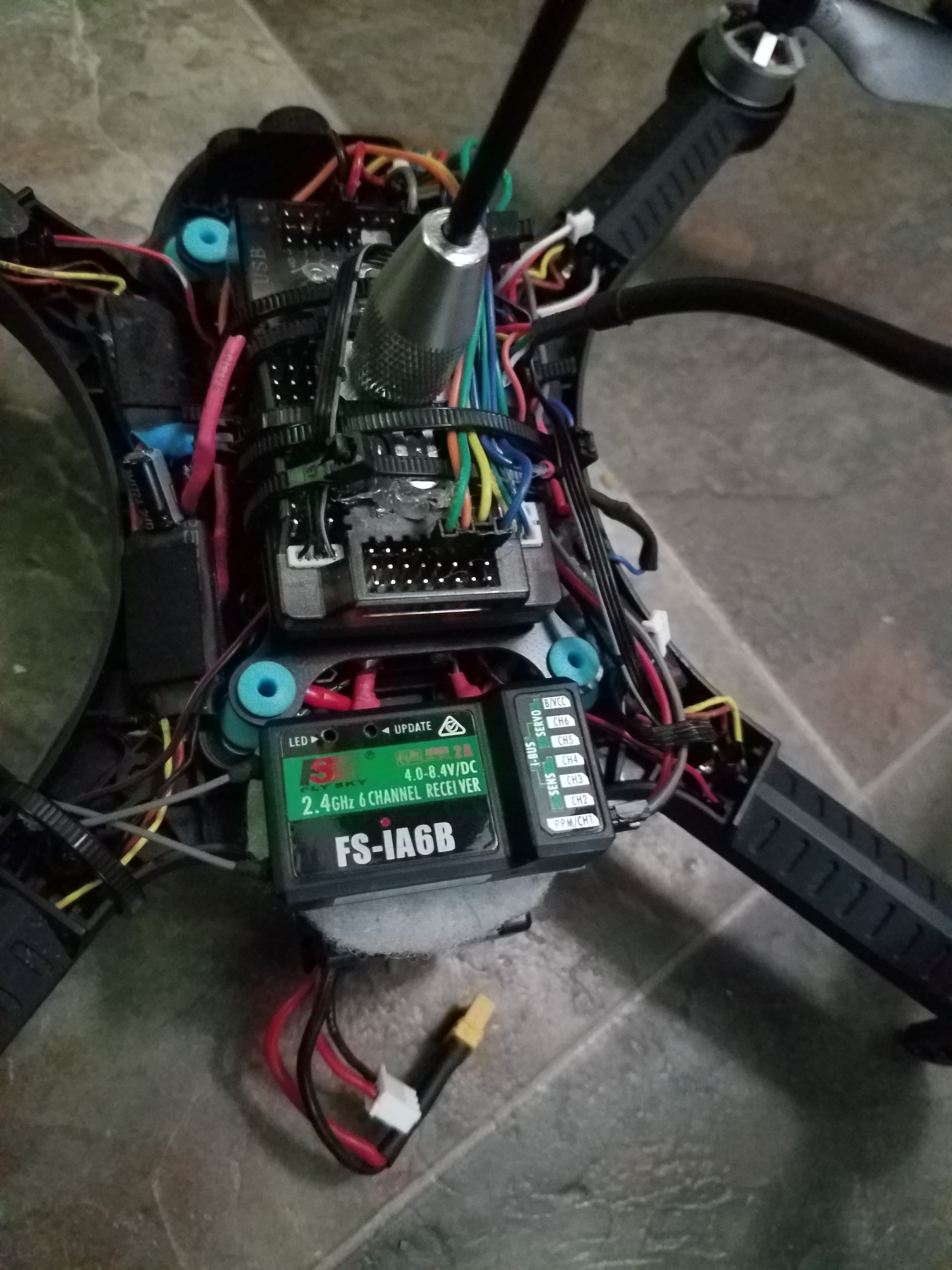
I can’t see my reply my connection are c1 from reciever ro input 1 of apm input 2 and 3 of amp jumper the power module pictures I am using a 2s battery power module recommends 3s and up I am getting 4.65 volts to apm

Hate to say this, but that aircraft is a total mess.
Had you said 5 in 1 power distribution board and vibration damper I would have know what you are talking about.
Sticking the GPS to the top of the APM totally negates the damping mount and those tie wraps and hot glue have got to go.
Form looking at your logs it looks like the APM isn’t decoding PPM. Try going back to PWM. If that works you made to flash to onboard PPM encoder:
http://ardupilot.org/copter/docs/common-ppm-encoder-apm2x-atmega32u2.html
To get the aircraft to fly you need to run 3S, 2S just ain’t gonna cut it.
It’s a work in progress this is our first time working with quadcopters its a f100 quad that I converted the hot glue and ties will come off when we get it working correctly I can’t understand why all the flight modes except rtl work thanks for the help
Switching back pwm mode fixed the rtl problem I will do the update and get a 3s battery