Helping a friend to upgrade his boat, it has pixhawk mini as the AP with GPS and telemetry link to the transmitter.
Trying to check functionality of the system prior to entering the water.
Initiating RTH only starts the motor with no rudder movement at all, is it OK ?
should the boat move to initiate rudder movement ?
Also implemented waypoint acquisition with auto navigation mode … with the same result, no rudder movement.
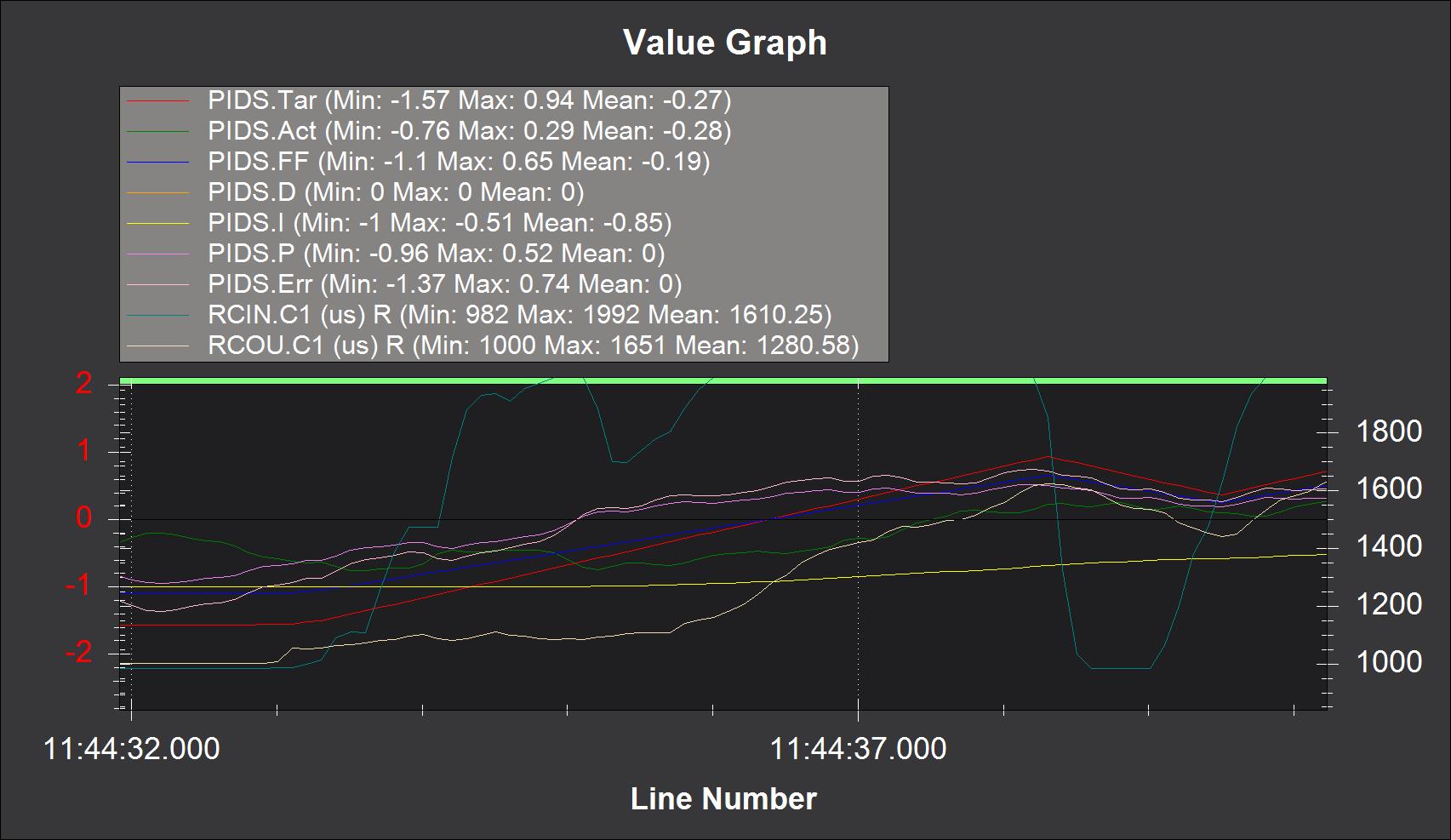
looking in the recorded data i see steering command… but no rudder movment
Well, had a pool sailing test today/
Auto modes does not function correct, had minute rudder steering.
Checked again on the bench, this time with navigation waypoint to the left or the right side…
had to enlarge FF up to 100 to see rudder deflection…
either the parameter scaling was changed from version 3 to 4, or I’m doing something terribly wrong… What am I missing ?
Have you checked that the rudder deflection and motor speed works in manual properly first?
It’s a good idea with any automated vehicle to check that everything works well in manual before trying to tune, test all the other modes
Thanks @Scott_Nunan
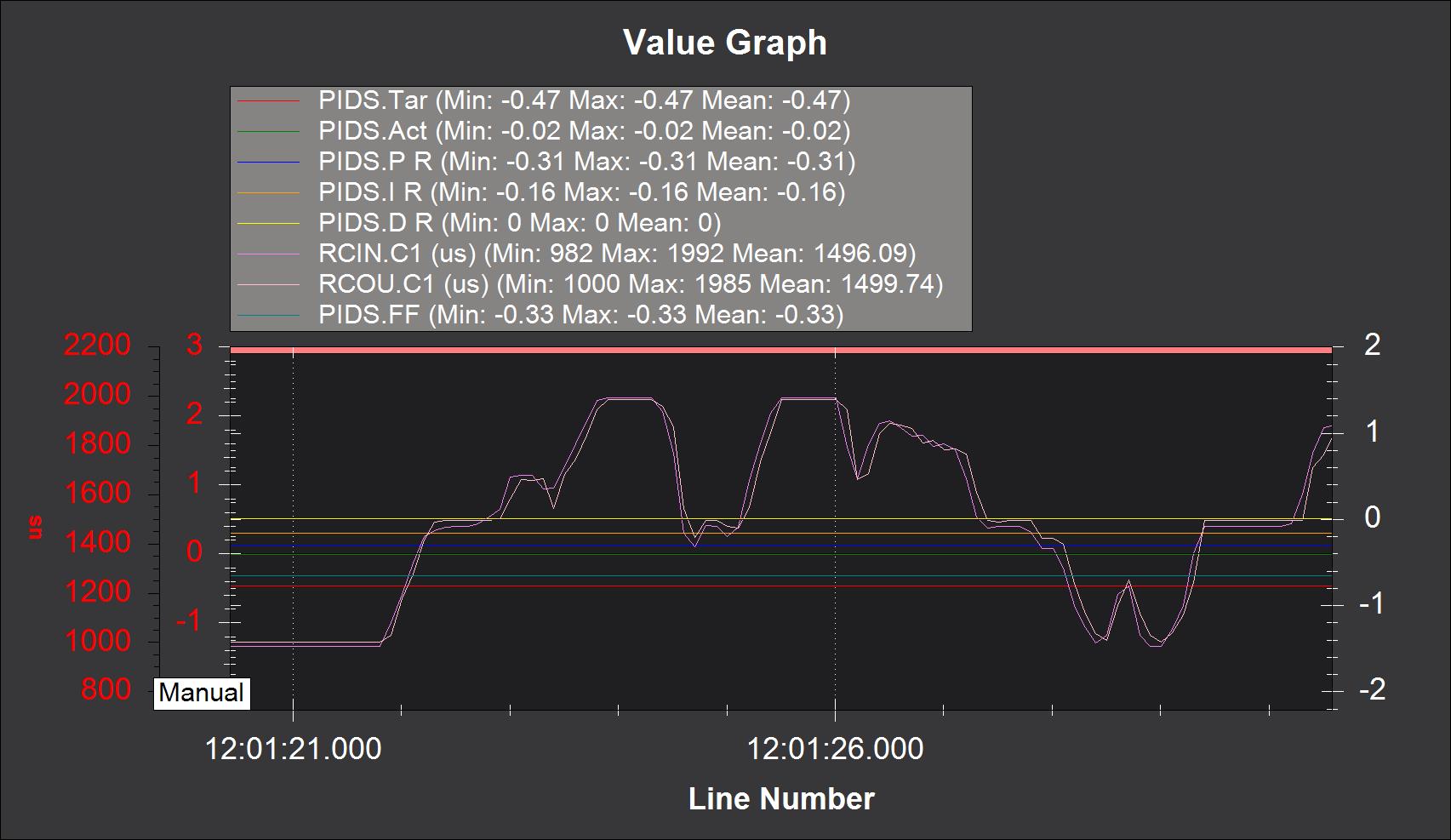
Well said, Yes, I did check the manual mode, it works well,
RTL,SRTL,AUTO all opens full throttle without rudder authority.
have some experience with ardupilot, 4 systems tuned on helicopters
could not figure out why the rudder does not move even though the PID seems to work fine.
Meny thanks @Themis_Nikoloudis
The document refers to ArduRover ver. 3.4, nowadays we have 4.0, that has boat flag and extra parameters.
Did change the maximal turn rate according to the doc. tried it on the STEERING mode, have to check ACRO as well.
Checked the boat on a stand, was looking to get gradual buildup of the rudder deflection, which did not accrue till enlarging FF to 100… which seems very high …
*** Addition ***
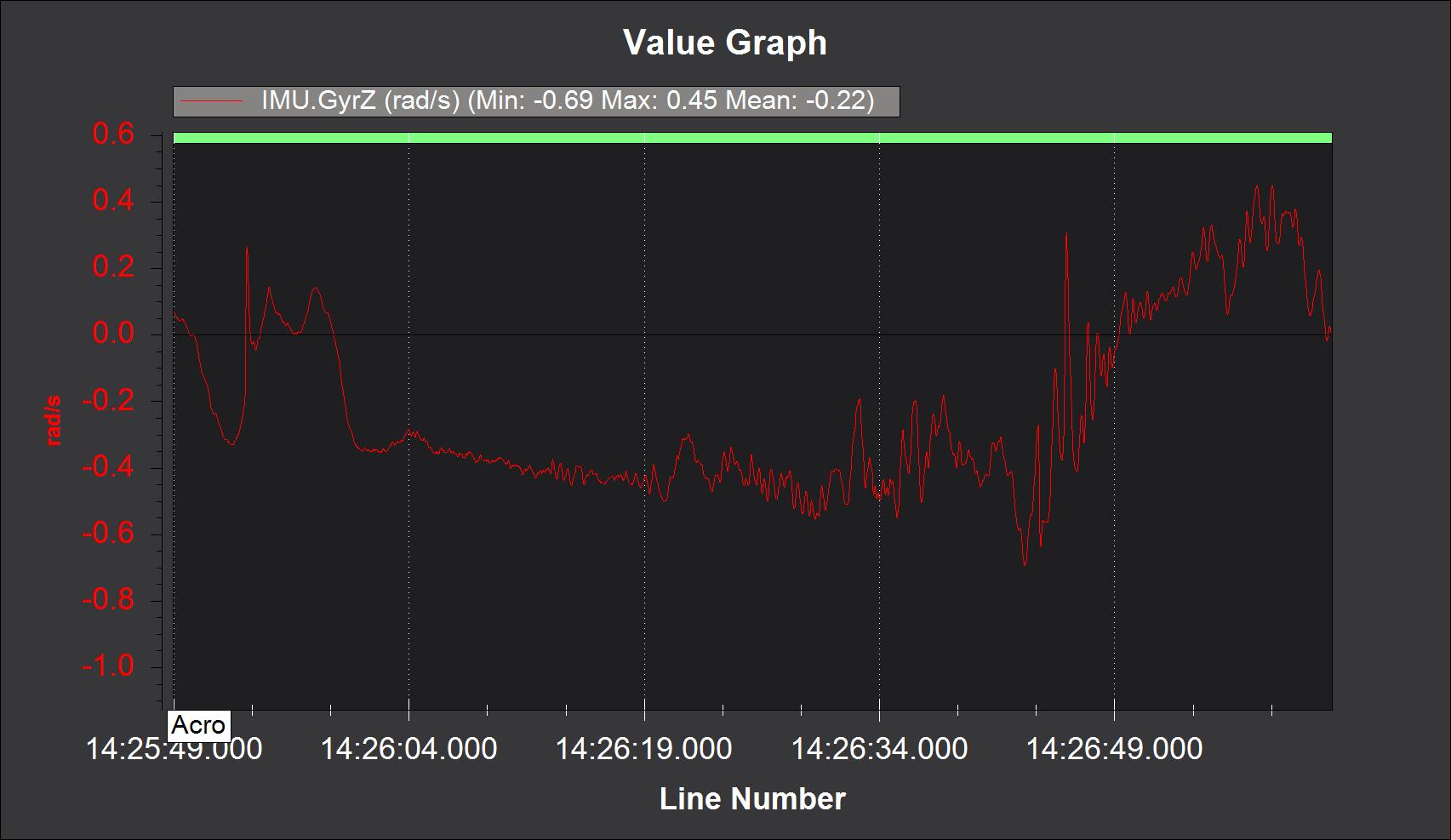
Checked now with ACRO mode, took down the FF to 0.5 … Hopefully will be wet checked tomorrow
OOPS…
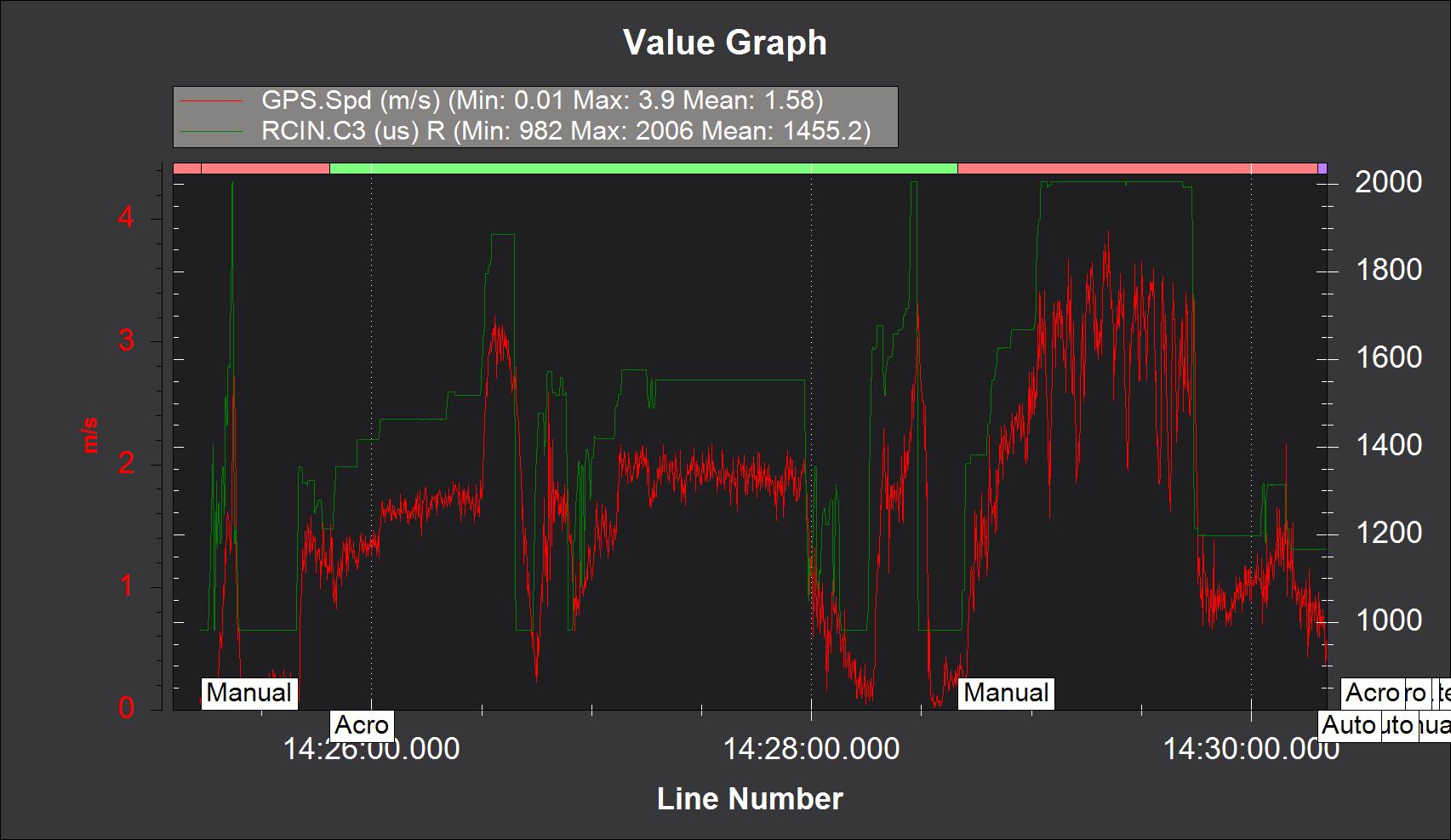
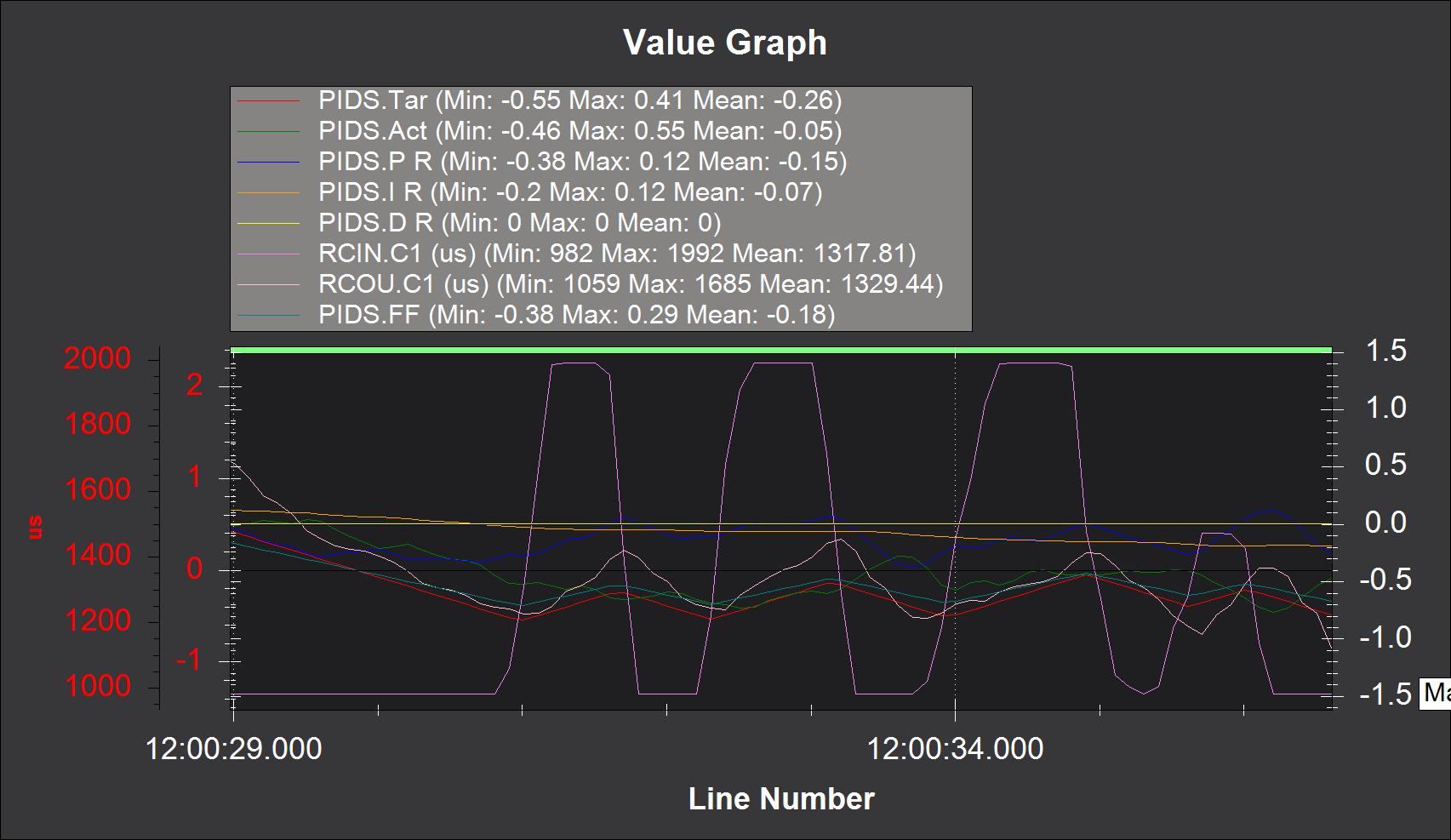
Did some more checks, Manual, Acro, Steering, RTL, SRTL and Auto modes.
Apparently, raising speed to 2.8 m/s was too much for checks in the confined pool, going down to 2 m/s.
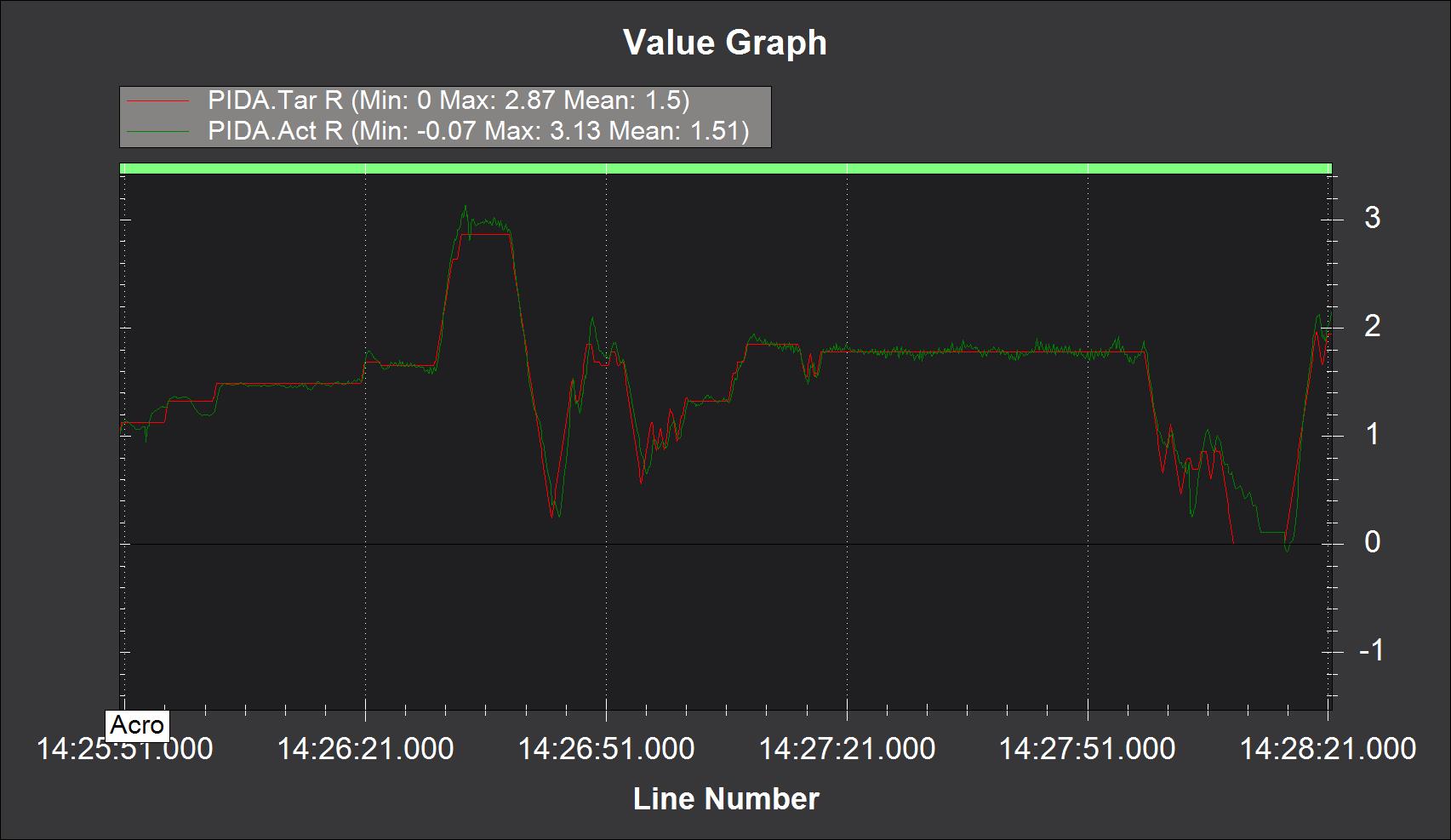
Got enough data to refine the coefficients, seems that the steering needs more FF and P, hopefully will be checked again tomorrow.
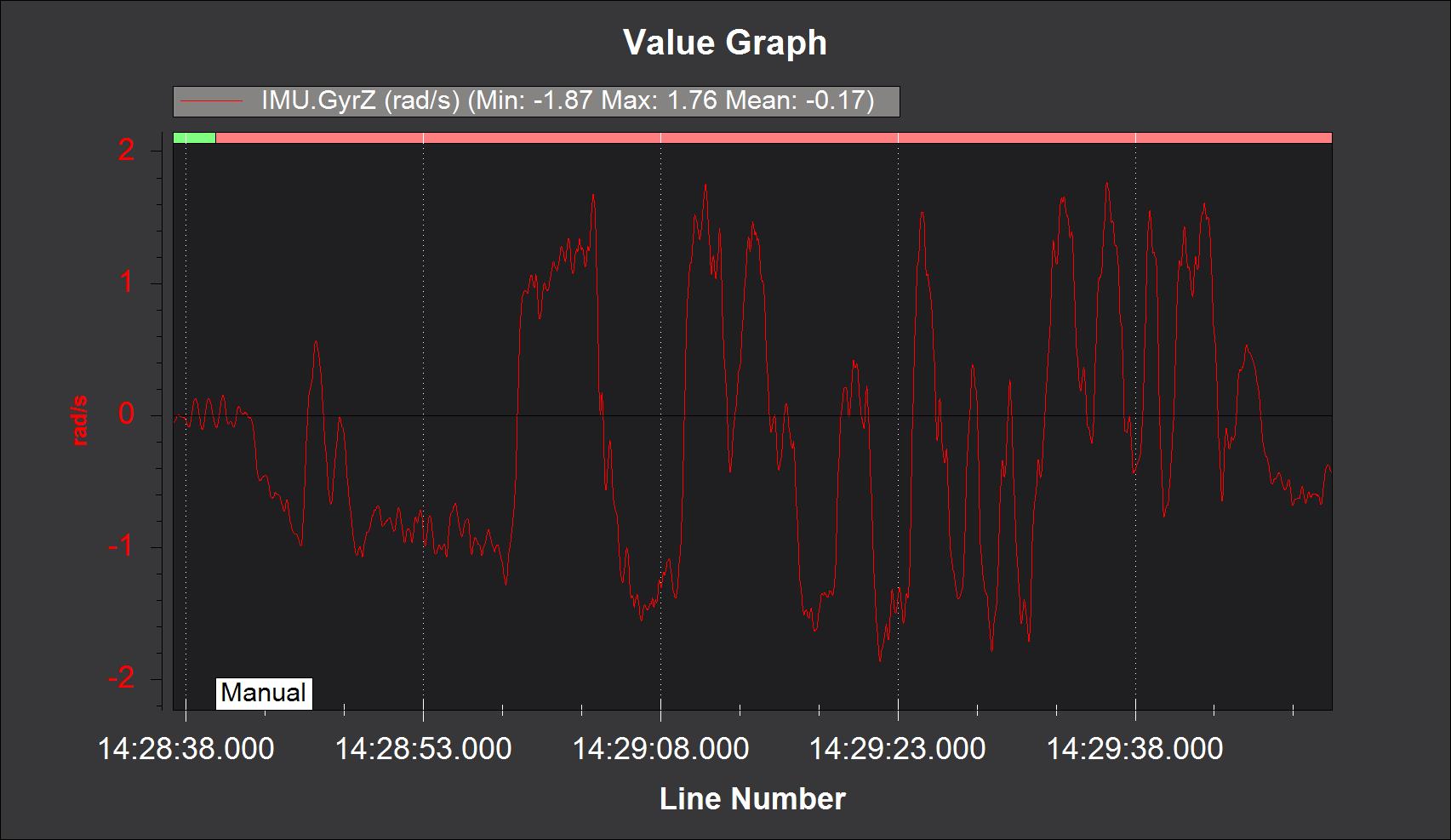
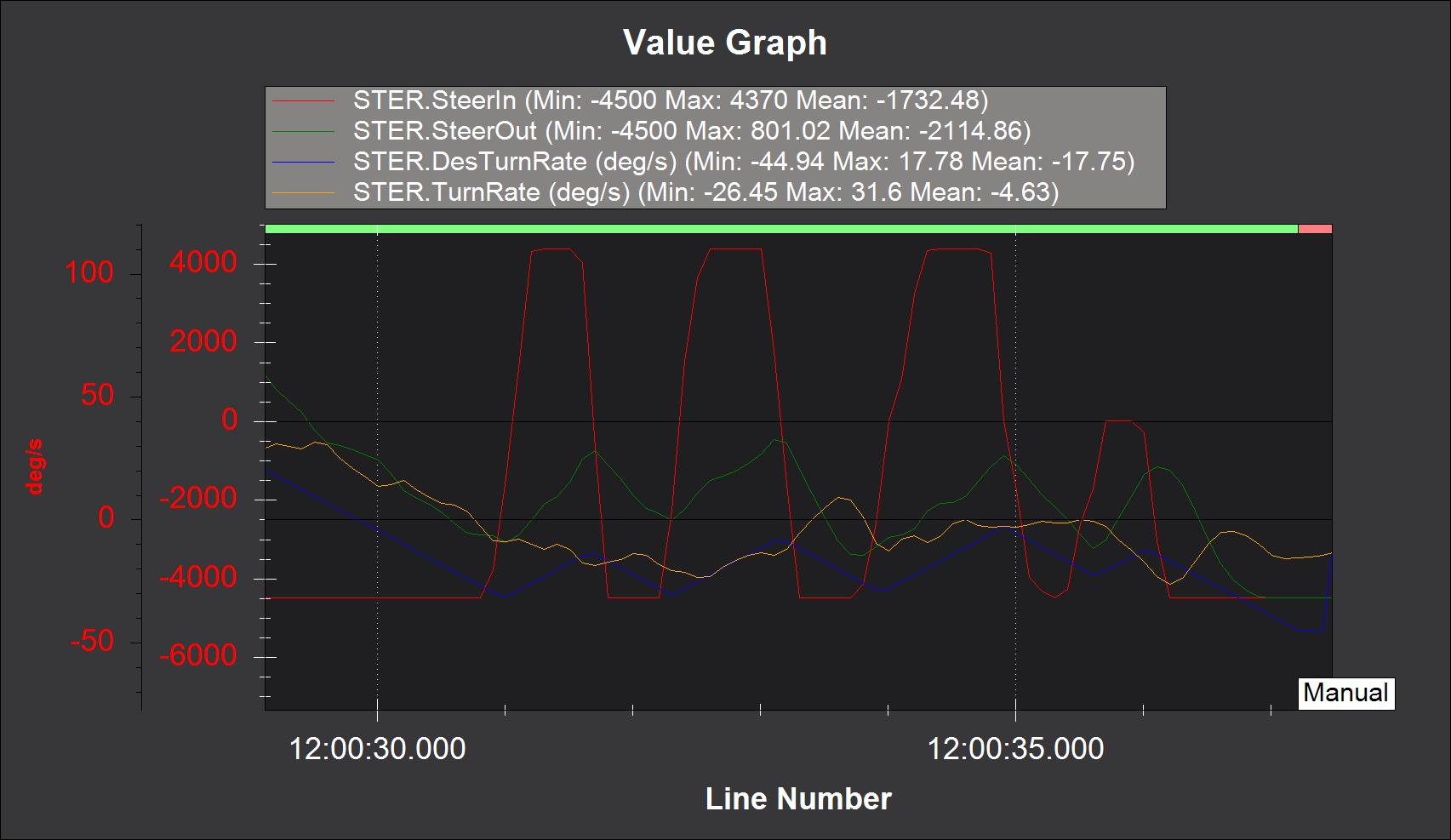
Acro steering mode is not responding well, takes long time for the boat to change the course,
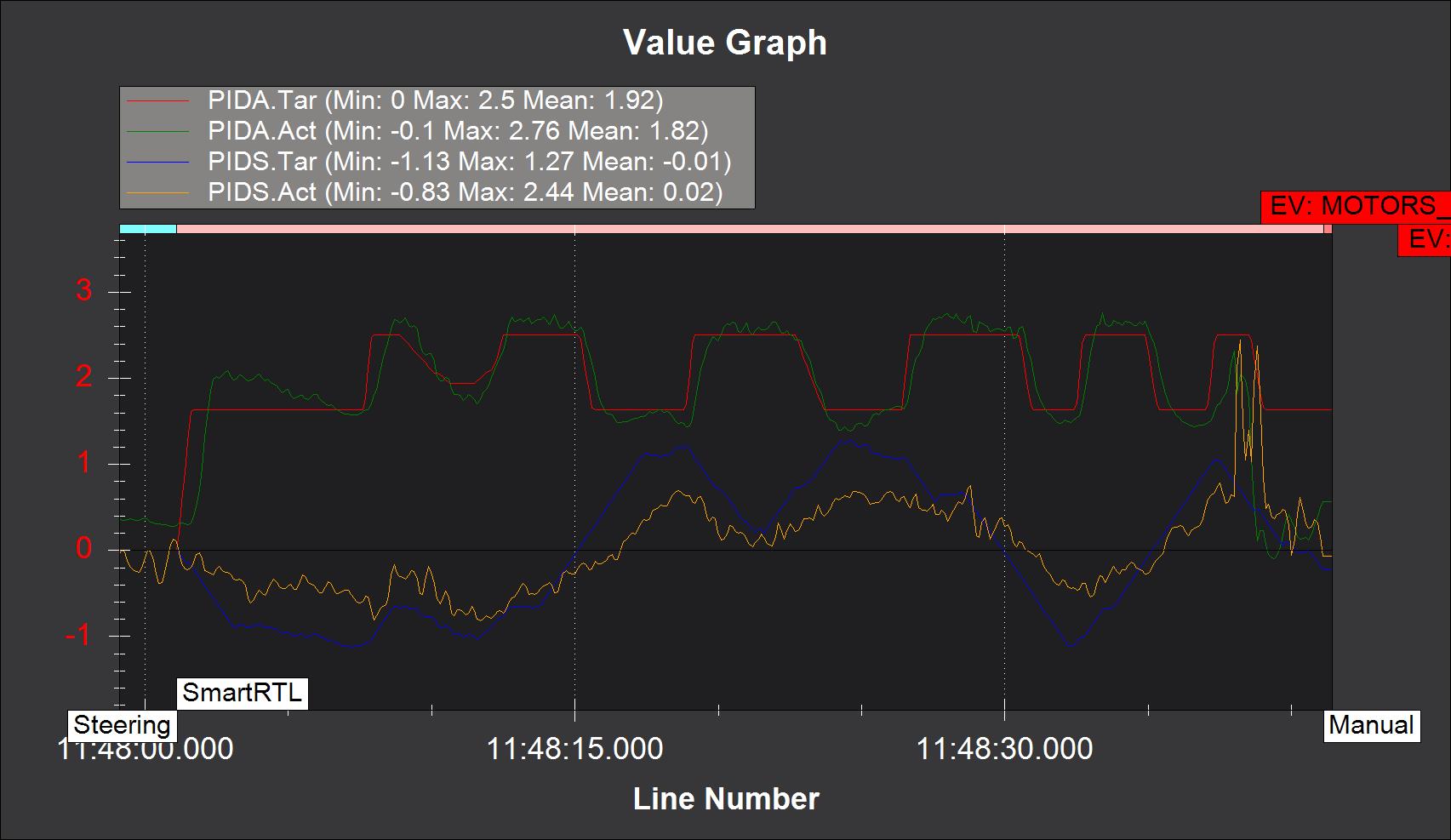
a bit crowded graph, was looking for a reason that slow the command:
Unfortunately, I am still in “theory” mode as I am waiting for the electronic parts to arrive, and currently building the mechanical parts needed for adapting Ardupilot on my real size sailboat!
What ground station are you using? Its not Mission Planner is it?
Mean time, found the reason for the ACRO misbehave, operantly the mode integrates the steering command (turn rate) to heading, and since i had put almost double of the actual Max turn rate, heading built up took too long to resolve, and made the steering lagging.
Hopefully I will tune the correct numbers in the following days
Had a great day today, finally all is working as required, my main problem was wrong ATC_STR_RAT_MAX and ACRO_TURN_RATE that were out of scope, once i changed it, all went well.
As I found out, the hard way - Definitely not
Looks as if the ACRO mode takes the rate command and integrate it for heading.
This was the first initiative for this post, as ACRO mode on the bench behaves confusing.
Giving continues turn command, the rudder had deflected to the correct side and then flipped to the other one… dew to the heading going more than 180.
In the water the accumulation of the heading made the turn change sluggish.
conclusion: use a bit less from the maximal tested manual turn rate