Good news everyone, I have found the issue on MissionPlanner !
It was just that is use only NTRIP v2.0 and RTKLib casters are using v1.0 protocol, so it failed without notice …
Fix is in CommsNTRIP: add a checkbox to select NTRIP v1.0 for older caster by khancyr · Pull Request #3172 · ArduPilot/MissionPlanner · GitHub
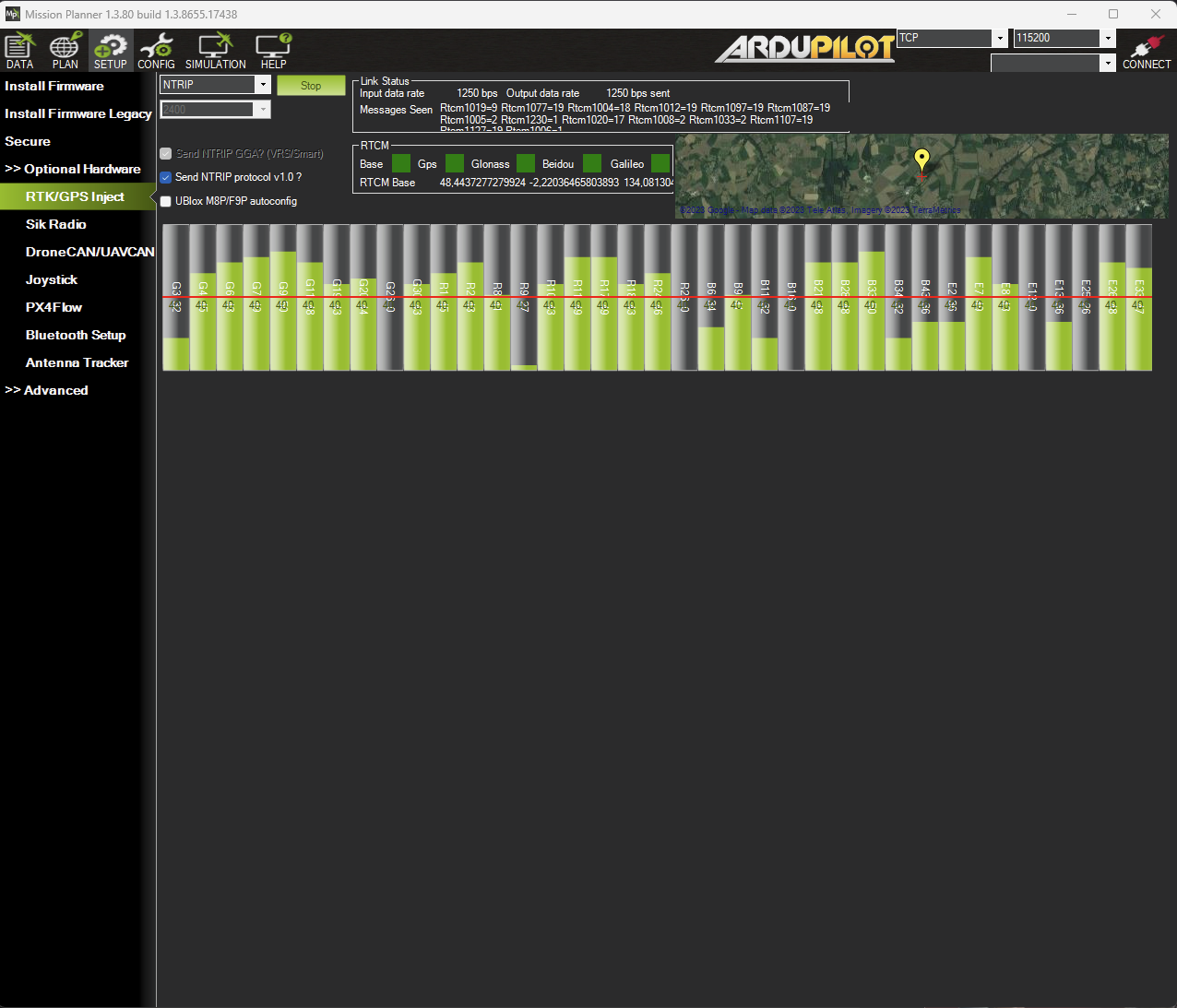
Part of the next release ! Check the Ntrip protocol v1.0 button