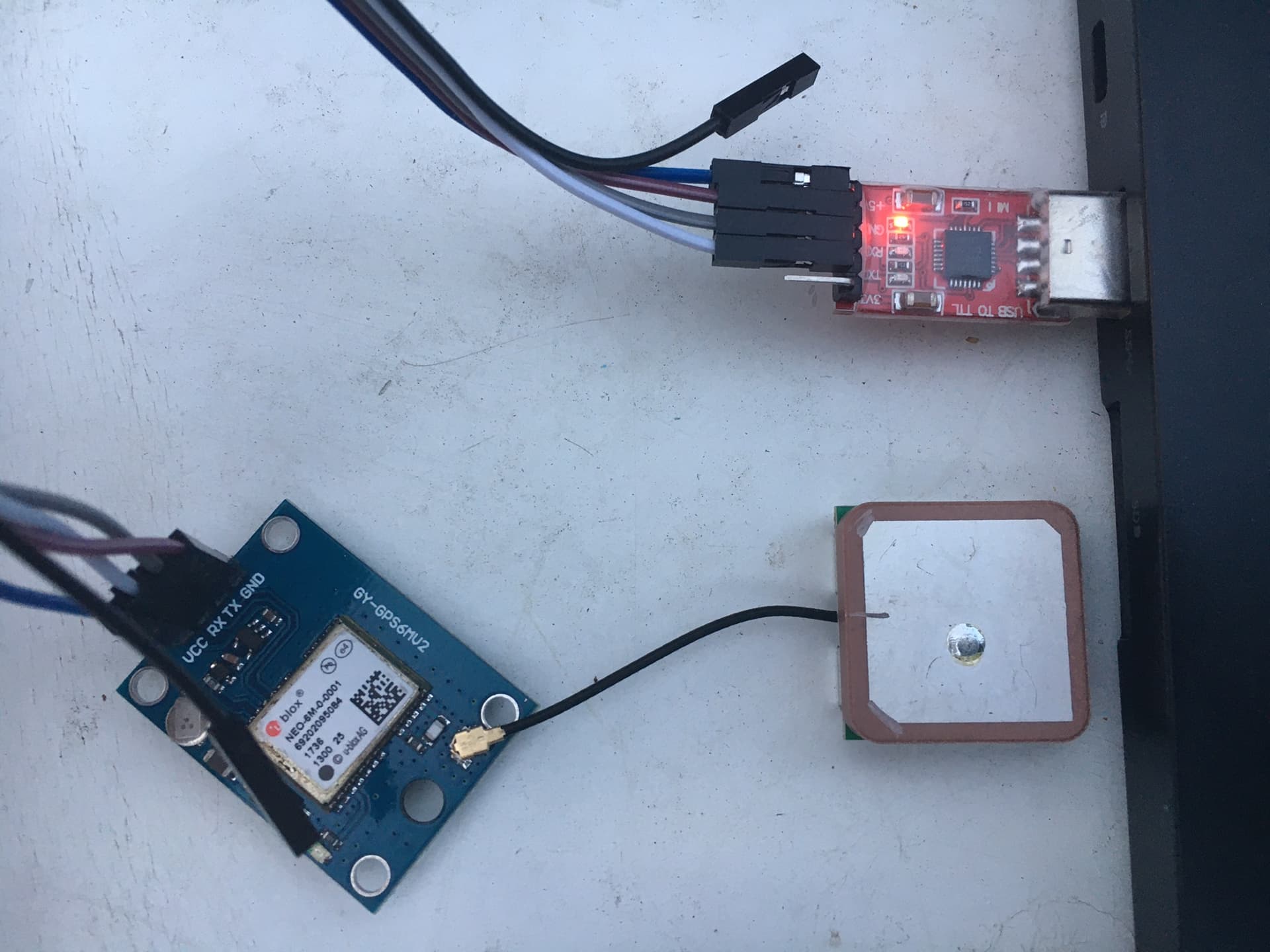
My RTK base station hardware is as follows:
GPS Board GY-GPS6MV2 with chip NEO-6M-0-0001
USB to TTL
I get position data using COM5 9600 baud rate using U-Connect software. 1st picture
However when I run mission planner RTK/GPS Inject (I get position invalid) 2nd picture
Can anyone help?
Thanks for the advice. @Michael_Oborne
What makes a unit RTK capable? My limited understanding thought I only required a GPS signal from a known location.
Any suggestions on capable hardware? Thanks in advance.
Tim
I’m forking out the cash for a Here+ Base and Here3 Rover, link below, but I don’t think this is compatible with my FC an Micro APM 2.7.2 which can only run Firmware: AC 3.2.1 / AP 3.4.0. It can’t upgrade from here.
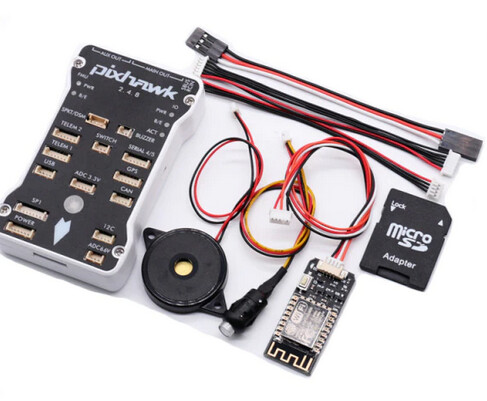
Do I need to buy a PixHawk instead? Is the PixHawk link below compatible with the Here3?
You need to buy a new Flight Controller, not necessarily a Pixhawk. There are many Flight Controllers supported that will work. Those 2.4.8’s are spotty and the hardware is dated. And you will want a telemetry system with sufficient range to provide correction data.
I’m not familiar with Here RTK devices; all information is here.
(I think that common Pixhawk 1 FC’s use now common 1.25 pitch connectors (not DF13)).
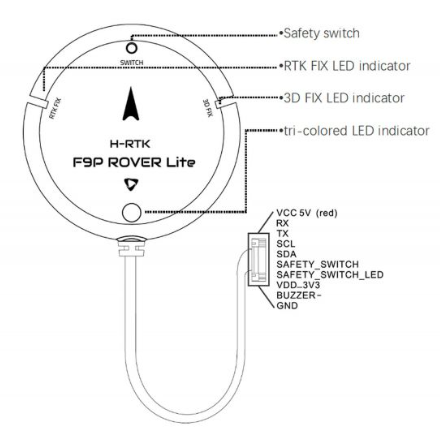
If you have access to a public RTK corrections service, you can simply try with:
MP, running on a laptop with Internet connection, will route the RTK corrections to the FC, which in turn would send them to the RTK GPS. So if you adapt the connections to your FC it could work.
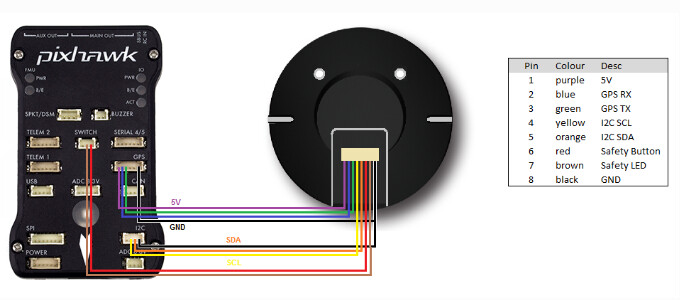
Note that a GPS with this connector
will connect directly to a Pixhawk 4 or similar FC, but for a Pixhawk 1 the cabling will have to be rebuilt for three connectors.
In general F9P chip based RTK GPS’s are preferable to M8P ones.
@Webillo thanks for the info!
I’m planning to stick with the 2.4.8 pixhawk and the M8P mainly due to cost.
The Here3 Rover unit seems to communicate on CAN as I believe the wiring you show is an older model here rover.
Manual for Here3: https://docs.cubepilot.org/user-guides/here-3/here-3-manual
Q is will the CAN communication work on the older model Pixhawk/firmware?
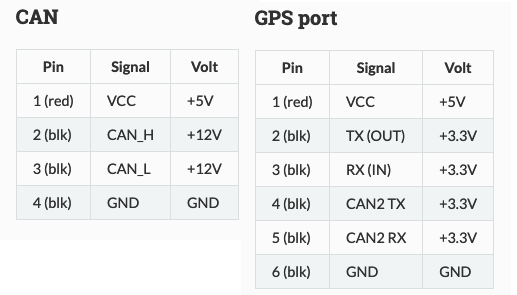
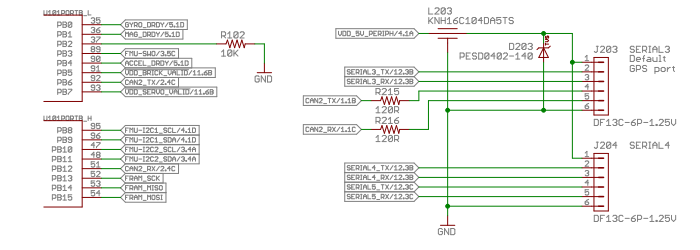
There are two connectors with CAN pins on old Pixhawk’s:
So if you have only one GPS use the CAN connector: it should work.
Cable is pin to pin but with different connectors (Pix2 and DF13 or 1.25).
That is true in many FC’s, but the figure is taken from the Pixhawk documentation (I remember connecting there time ago a GPS/I2C compass, and the compass was not recognized (CAN signals, not I2C)).