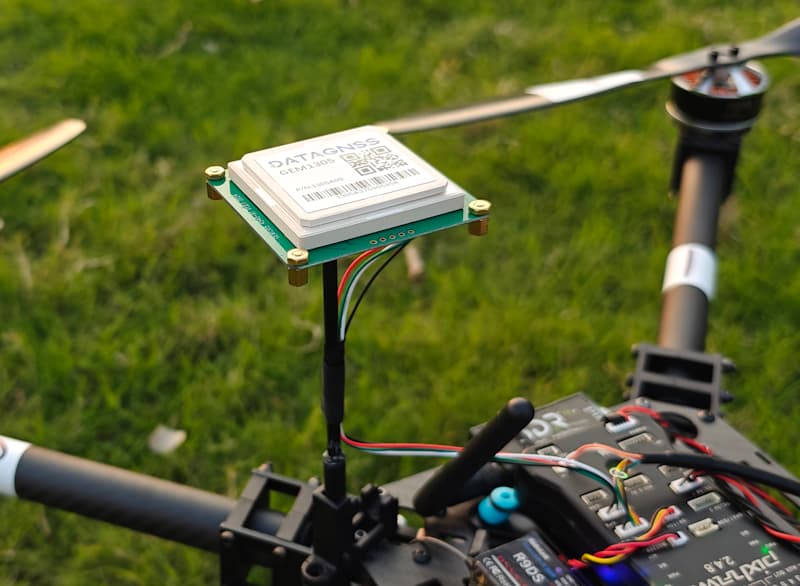
We recently tested the latest lightweight( < 50g ) GEM1305 RTK receiver with antenna. This RTK chip is based on Allystar’s latest chip but has customized protocols to better support Ardupilot. It supports a 5Hz output rate and has 2 UART outputs. In our testing, we only needed a 6P data cable to fully utilize the RTK function.
For the base station, we also used a modified model that only required simple configuration to send RTCM to the drone end through ground control software.
If you want better and more stable signal, you can also use a ground plane to enhance it, like this.
@datagnss Is it possible for you to share some logs of your test flights? I am planning to purchase this module and it would be helpful to make decision based on that.
Hi , If you are referring to GNSS log data, we can provide some GNSS logs recorded on top of the vehicle. Lately, our work areas haven’t been ideal for conducting aerial data collection.
I’m using GEM1305 receiver with ArduCopter V4.5.7 (2a3dc4b7). The connection to flight controller is standard, nothing special: 5V, RX, TX, GND.
Arducopter (relevant) config parameters:
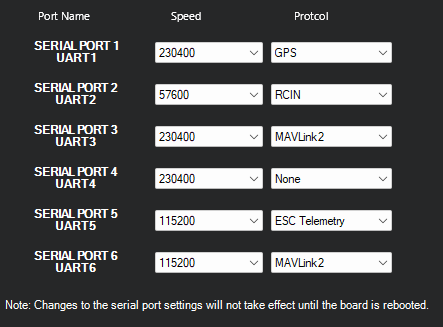
SERIALx_PROTOCOL = 5
GPS1_TYPE = 5
Serial speed was set to 230400.
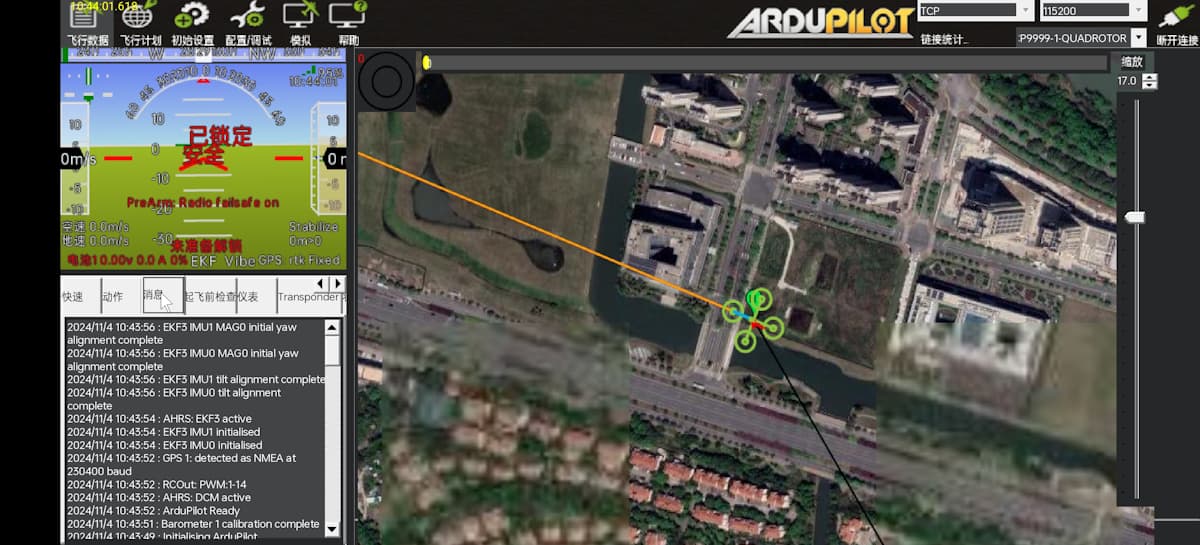
Flight controller can receive data from GEM1305, but the PreArm: GPS signa is unhealthy. On the HUD I can see that the GPS sees only 3 satellites.
I tested the GEM1305 with a standard USB-serial converter and Satrak software. The GEM1305 was able to see 50+ satellites.
Can you please help, what other settings do I have to perform to be able to use more than 3 satellites, and to be able to Arm the drone?
During our testing, we occasionally encounter a “GPS unhealthy” status for a few seconds, but the data shows no issues—both the satellite count and positioning appear normal.
I have set the above mentioned parameters but GPS is still unhealthy
The drone logo in MissionPlanner map is at the right position, where my house is, this is OK.
Maybe I need to lower the PreArm GPS health status check limit?
Let me copy the output of message window, maybe it contains important bits:
20:06:08 : Arm: GPS 1: not healthy
20:06:03 : PreArm: GPS 1: not healthy
20:05:59 : Arm: GPS 1: not healthy
20:05:48 : ELRS: Link rate 250Hz, Telemetry rate 5Hz
20:05:43 : ELRS: Link rate 250Hz, Telemetry rate 53Hz
On the topic of @datagnss modules, I noticed that you closed the PR for ArduPilot support of the HED10L dual antenna module. Do you have plans to revisit that code?
I did compile it myself and attempt to use it. It did not provide proper support.
Yes , maybe we will open the pr again.
We had a private version to test it, but we reviewed the code, which can’t be checked by the team in short time, this is why we closed the previous PR.
I agree, PreArm checks have a reason, they can’t be just ignored.
I will try to change HDOP threshold.
During the research of this issue I found a solution in another thread: This issue was solved by soldering a secondary GPS to the flight controller.
I can’t find the forum/topic right now…
There’s already a Walksnail WS-M181 compass+GPS on my drone, but currently I’m only using the compass, via I2C.
When I get chance at home, I’ll try this “trick” to use the GPS function of the module.
What’s your opinion of this? Do you see any issue with this?
We checked the code, in default settings, our RTK Receiver works to output the nmea data 5hz, the details is:
GGA/RMC 5hz, GSA and GSV 1Hz
So when there is no GSA sentence coming with GGA, it will prompt the warning of unhealthy.