It is becoming more common to use DroneCAN GPS modules for either moving baseline RTK for vehicle yaw and for global RTK with a RTCM feed from a ground station.
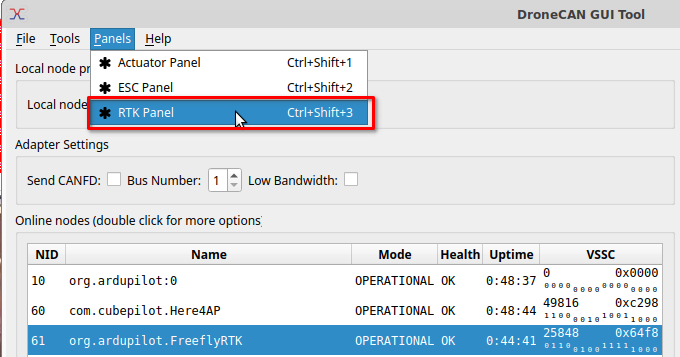
To help with diagnostics of issues related to using DroneCAN GPS modules with RTK I have released version 1.2.17 of the DroneCAN GUI tool today. It has a new “RTK Panel” with diagnostic information.
Here is a typical display:
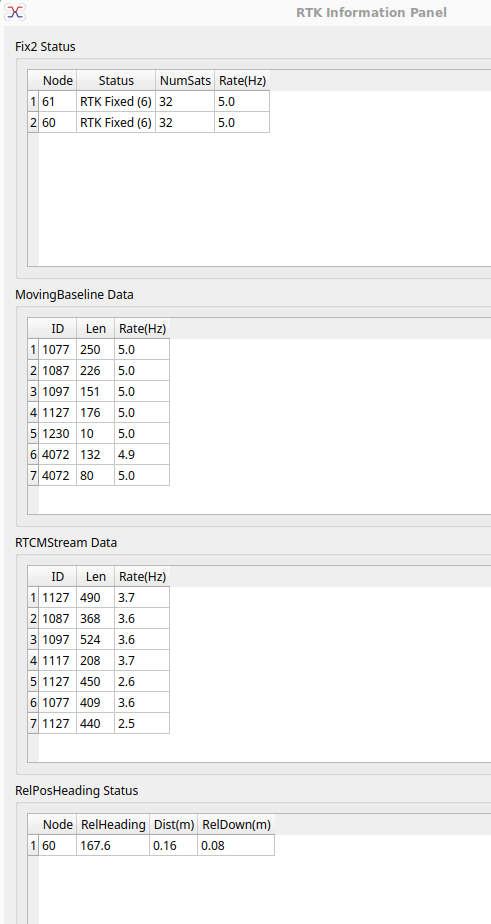
The display is in 4 parts:
- The Fix2 Status shows the status of any DroneCAN GPS along with the fix type, the number of satellites and the solution rate (the rate at which DroneCAN Fix2 messages are being sent). The key things to check are that the rover in a moving baseline setup has got a “RTK Fixed (6)” status and that it is achieving a 5Hz rate.
- The MovingBaseline Data section shows the MovingBaseline DroneCAN data sent from a RTK moving baseline base to a moving baseline rover. This is the data that is sent between the two GPS modules to allow the rover to get a RTK fix on the base which allows is to calculate a relative position from the base. It is this relative postion between the two GPS modules which allows yaw to be calculated. The key thing to check in this section is that the data is being supplied between the two GPS modules at 5Hz.
- The RTCMStream Data is RTCM data sent from the ground station to any DroneCAN GPS modules. This is only needed if you want a global RTK lock rather than just a moving baseline lock for yaw. The data should be at least 2Hz, preferably more.
- The RelPosHeading status is the key data for the moving baseline yaw solution. A GPS will only send this message if it is a moving baseline rover and has a RTK Fixed lock with sufficient accuracy. The key thing to check is that the two reported distances (horizontal and vertical) match the actual distances between the two GPS modules.
You can install the latest DroneCAN GUI tool on Windows by downloading is from here:
https://firmware.ardupilot.org/Tools/CAN_GUI/
or you can install on Linux or MacOS using the python pip tool dronecan-gui-tool · PyPI