Hello!
I am using Holybro’s Pixhawk4 and u-blox’s ZED-F9P RTK module. RTK used Network RTK VRS, checked the FIX status (accuracy of 0.02m in u-blox’s u-center program) before take-off and flew.
The drone automatically moves to the coordinates specified in the guide mode (coordinates of the exact point). (I have the exact coordinates of the point. There is a mark established by the country at that point.) I tested the accuracy of my drone based on this point, and it shows an average error of 30cm.
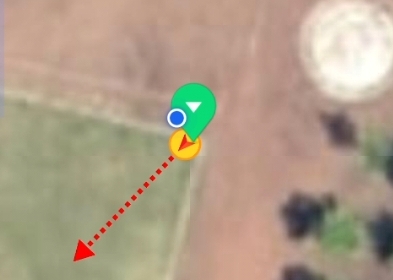
In the picture, the position indicated by the green marker is the exact point you want to face, and the yellow round marker with a red arrow is the position of the drone. (The center of the yellow circle is the position of the drone)
(The blue is the location of my phone, I don’t care)
Since the location of the green coordinates was set as the destination of the Guide mode in the code, it is correct to move to the location of the marker.
I haven’t figured out what the problem is yet. In the photo, it seems that the point of the green marker and the center of the yellow marker do not match, but in fact, there is an error of 30cm in the left direction of the green marker in the photo. However, even if you repeat driving in Guide mode, it stops at that spot.
Are there any parameters inside the ardupilot that can give an error to the accuracy of RTK?
Thanks for taking the time for me. We are waiting for your answer.