For some reason, the RPM on my helicopter got messed up. The RPM measurement value of hall sensor is noisy. I’ve confirmed that the UAV is working properly, it’s just a matter of measuring values.
My firmware version is 4.1.5. My unmanned helicopter is a fuel engine. My hardware is CUAV X7 Pro. Hall sensor is set at 62 pin.
Thanks for your time!
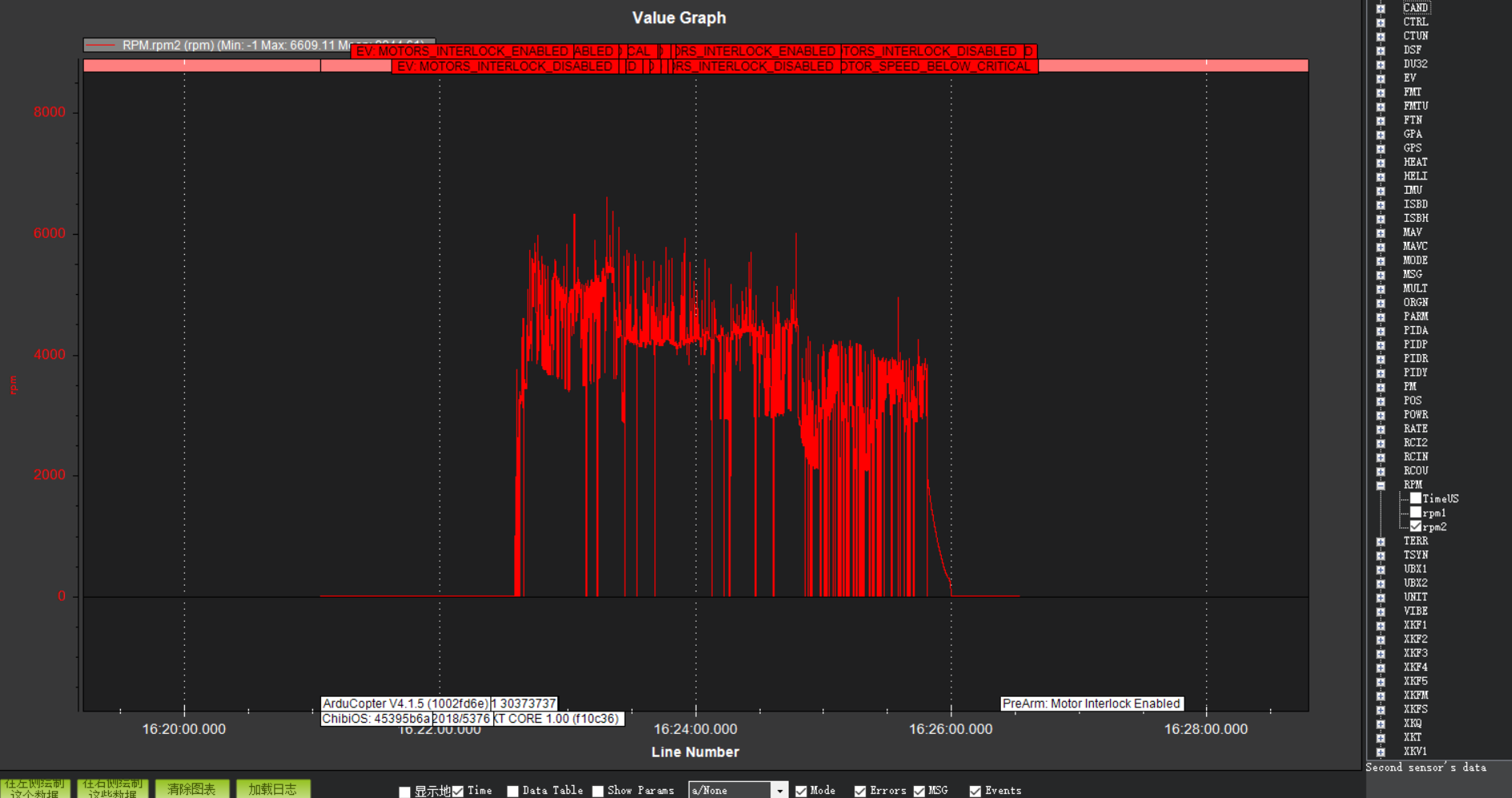
This is my flight log.
RPM data
What kind of hall sensor do you have?
There are several types.
Did you use a pulldown resistor on the Hal sensor? I recently build one and tested this on on a Arduino first with and without pulldown resistor, without I also got a noisy result.
For the hal sensor itself I used the 3144 hal senser, with a 10K pullup resistor over the signal wire and the plus wire.
For a NPN (ex:3144) should be a Pull-up resistor.
For a PNP you do a Pull-down.
Your right, should be pull-up, but the main thing is that it keeps the signal high or low and not somewhere in the middle so you get a clear signal.